Hi everyone,
After conducting some flight tests with a hexarotor equipped with 6 MyxaB controllers, we investigated the Ardupilot log and found some of the Myxas to have a rising error count throughout the flight.
How can I investigate what were the actual errors that disturbed the ESC?
Is “Ecnt” in the Ardupilot log simply a count of the number of errors/warnings that were encountered by the Myxa?
I am not sure about the data handling and representations adopted by ArduPilot, but the UAVCAN field error_count of the ESC status message represents the number of times the rotor was stalled since the last requested spinup.
For example, once you commanded the motor to stop, the error counter will be cleared (zeroed). Once you commanded the motor to start (by sending any non-zero setpoint), the error counter will be reflecting the number of times the rotor was forcibly stalled either by excessive load torque or by a misbehaving control loop due to a tuning issue.
I recommend you to consult with the ArduPilot community to find out the meaning of the metric you’re inquiring about.
Thanks for the reply Pavel.
The Ardupilot code does nothing special but only logs the error_count field from the esc.status messages as they come in.
We are operating at relatively low RPMs (~1500) and we see that some of the Myxas’ error count start rising while in the air (with ESC 4 in particular). When the Ecount reaches 100 the ESC is shut down.
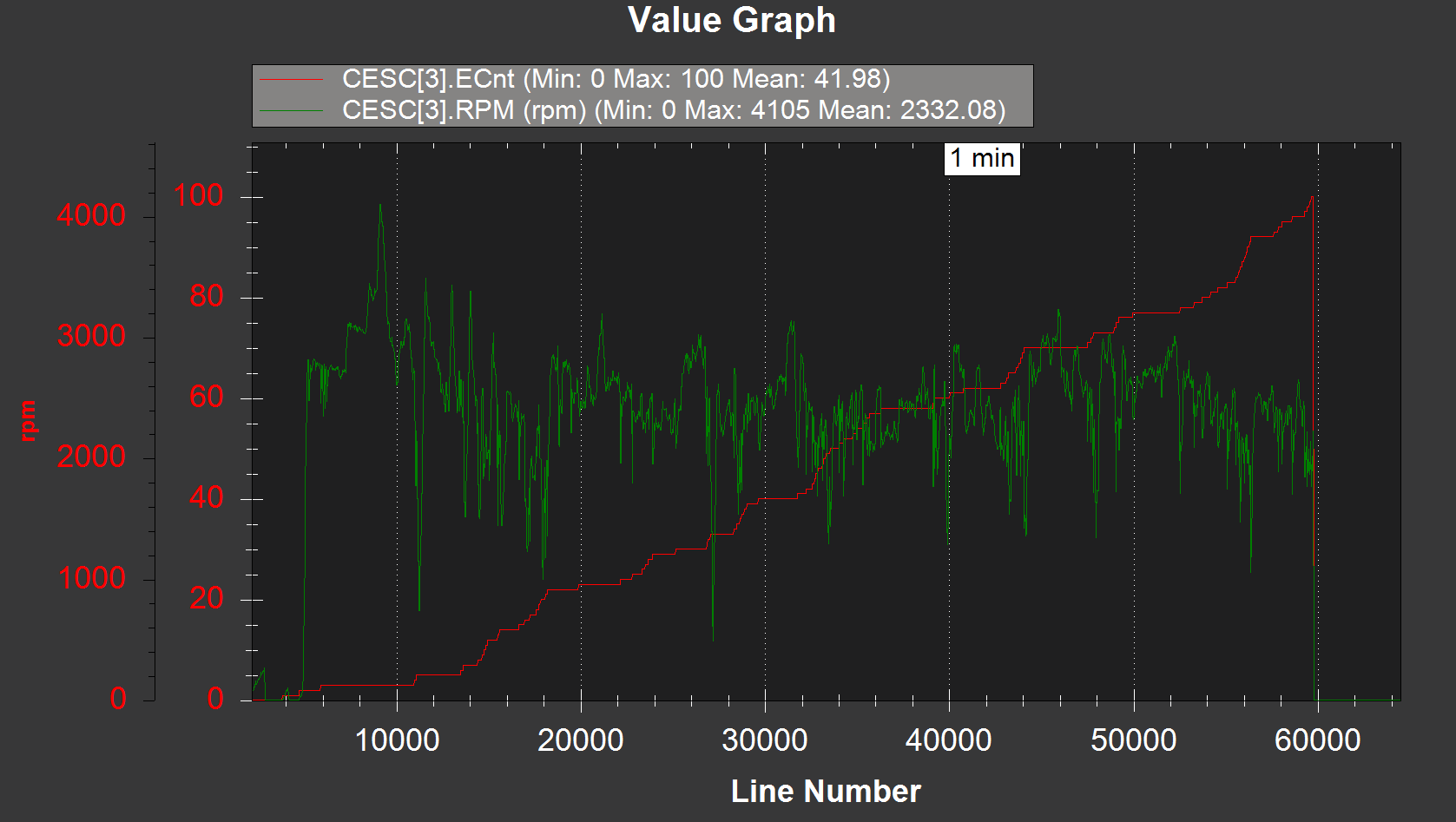
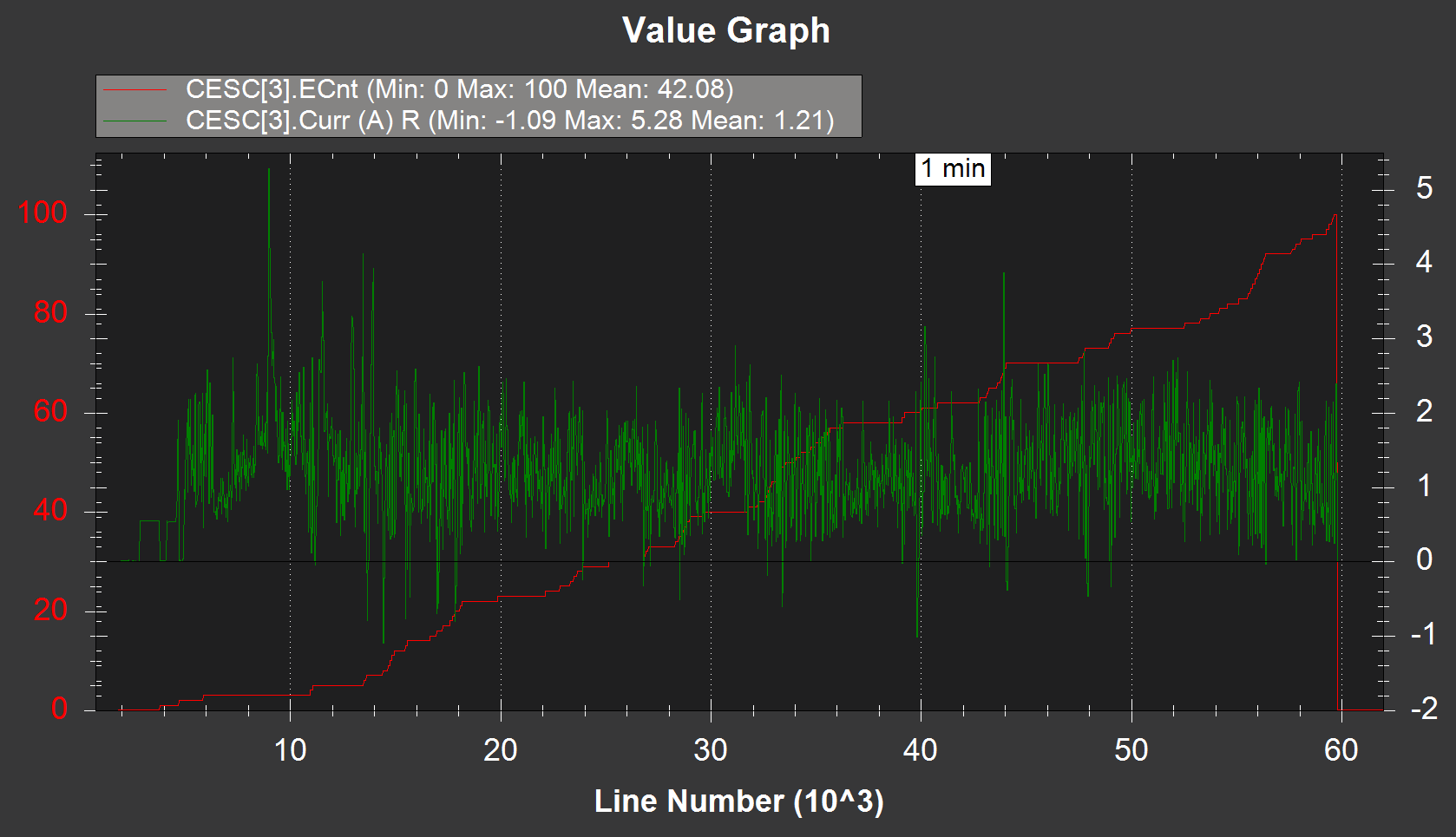
I would have guessed that when the RPM of the motor drops - the Myxa is having trouble accelerating it back again, the current peaks and an error is thrown, but I can’t see good correlation to that.
What could be the reason of this behavior?
What would be the recommended parameters to look at?
Does the shutdown of the ESC after 100 errors something that is programmed into it? Can it be changed?
Our motors are connected to a gearbox. Should we perform the motor autotune procedure while connected to the gearbox or with the motor fully disconnected? Is it important to perform each arm’s autotune separately or copying a single arm’s parameters to all other arms (having the same motor+gearbox combination of-course) close enough?
Thanks for the help.
Can you reproduce this behavior on the ground? Can you please dump the configuration parameters and share the file with us? Are you using the default settings of the motor control loop (aside from the motor parameters) or have you retuned the drive? Thanks.
Irrespective of the cause, you can control this behavior by setting the error limit register ctl.num_attempts, up to effectively disabling this behavior by raising the limit to the maximum, which is 10 million errors.
Thanks Pavel.
Here are the specific controller’s parameters:
| uavcan.node_id | 53 |
|---|---|
| uavcan.esc_index | 3 |
| uavcan.esc_ttl | 0.5 |
| uavcan.esc_sint | 0.050000001 |
| uavcan.esc_sintp | 0.5 |
| uavcan.esc_rcm | 2 |
| uavcan.esc_revrs | FALSE |
| rcpwm.ttl | 0.300000012 |
| rcpwm.ctl_mode | 2 |
| rcpwm.reverse | FALSE |
| ctl.spinup_durat | 1.5 |
| ctl.num_attempts | 100 |
| ctl.vm_cci_comp | FALSE |
| ctl.vm_oversatur | FALSE |
| ctl.pwron_slftst | FALSE |
| ctl.hard_stop | FALSE |
| ctl.vm_pppwm_thr | 0.949999988 |
| ctl.field_weaken | FALSE |
| ctl.fw_v_boost | 1.200000048 |
| m.num_poles | 28 |
| m.max_current | 28 |
| m.max_id_current | 0 |
| m.min_current | 0.100000001 |
| m.spup_curr_begn | 2 |
| m.spup_curr_end | 0.25 |
| m.flux_linkage | 0.001807593 |
| m.resistance | 0.056620944 |
| m.induct_direct | 2.47E-05 |
| m.induct_quadrat | 2.47E-05 |
| m.min_eangvel | 400 |
| m.max_eangvel | 17500 |
| m.current_ramp | 100 |
| m.voltage_ramp | 15 |
| m.eangvel_accel | 6000 |
| m.eangvel_decel | 5000 |
| m.eangvel_ctl_kp | 0.003 |
| m.eangvel_ctl_ki | 0.005 |
| m.eangvel_ctl_kd | 1.00E-06 |
| m.current_ctl_bw | 0.050000001 |
| m.bemf_ctl_kp | 9.600000381 |
| m.bemf_ctl_ki | 0.949999988 |
| m.fw_evel_hyst | 100 |
| mid.phi.curr_mul | 0.300000012 |
| mid.phi.eangvel | 300 |
| mid.phi.stall_th | 4 |
| mid.l.curr_mul | 0.059999999 |
| mid.l.curr_freq | 900 |
| mid.r.curr_mul | 0.300000012 |
| o.type | 0 |
| o.ekf.q_id | 10000 |
| o.ekf.q_iq | 30000 |
| o.ekf.q_eangvel | 3000000 |
| o.ekf.p0_idq | 0.001 |
| o.ekf.p0_eangvel | 0.001 |
| o.ekf.cc_comp | 0 |
| o.mras.gain | 150000 |
| bec.can_pwr_on | TRUE |
| rcpwm.enable | FALSE |
| rcpwm.pulse.bot | 0.001 |
| rcpwm.pulse.mid | 0.0015 |
| rcpwm.pulse.top | 0.002 |
| rcpwm.pulse.hyst | 2.00E-05 |
| vsi.pwm_freq | 47000 |
| exec_aux_command | -1 |
Hi Gad,
Can you reproduce this issue on the ground manually sending fixed setpoint to the Myxa?
I suggest you to run motor identification on this Myxa one more time. Possibly, the motor parameters have changed a little bit.
Increase the ‘uavcan.esc_ttl’ parameter up to 0.7 sec as well. Myxa stops automatically the motor if it hasn’t received the setpoint from the autopilot for this period of time.
Would you recommend doing the motor identification process with the motor detached/attached to the gearbox/attached to the gearbox + prop?
Is it possible to run the identification process through the UAVCan, or only through kucher via USB? When the vehicle is fully assembled - getting to the USB port is not an easy task.
We’ll try to replicate the phenomenon and update…
It is recommended to carry out the motor identification procedure without any load (gearboxes, propellers detached).
You can run the motor identification procedure via UAVCAN protocol by setting parameter exec_aux_command to 1002.
Thanks @anon81208224
Re-tuned the Myxa with gearbox and props attached (it looked as if these parameters produce smoother operation than the parameters we got after tuning without anything attached on the motor)
Also - the some of the Myxas were having trouble starting up the motor so I tweaked the spinup parameters a bit.
After that we got smooth startup and operation and performed two flights without a single error count.
FYI:
The discussed Myxa’s parameters without any load:
| uavcan.node_id | integer | 53 |
|---|---|---|
| uavcan.esc_index | integer | 3 |
| uavcan.esc_ttl | real | 0.5 |
| uavcan.esc_sint | real | 0.050000001 |
| uavcan.esc_sintp | real | 0.5 |
| uavcan.esc_rcm | integer | 2 |
| uavcan.esc_revrs | boolean | FALSE |
| rcpwm.ttl | real | 0.300000012 |
| rcpwm.ctl_mode | integer | 2 |
| rcpwm.reverse | boolean | FALSE |
| ctl.spinup_durat | real | 1.5 |
| ctl.num_attempts | integer | 100 |
| ctl.vm_cci_comp | boolean | FALSE |
| ctl.vm_oversatur | boolean | FALSE |
| ctl.pwron_slftst | boolean | FALSE |
| ctl.hard_stop | boolean | FALSE |
| ctl.vm_pppwm_thr | real | 0.949999988 |
| ctl.field_weaken | boolean | FALSE |
| ctl.fw_v_boost | real | 1.200000048 |
| m.num_poles | integer | 28 |
| m.max_current | real | 28 |
| m.max_id_current | real | 0 |
| m.min_current | real | 0.100000001 |
| m.spup_curr_begn | real | 2 |
| m.spup_curr_end | real | 0.25 |
| m.flux_linkage | real | 0.001773993 |
| m.resistance | real | 0.058722541 |
| m.induct_direct | real | 2.37E-05 |
| m.induct_quadrat | real | 2.37E-05 |
| m.min_eangvel | real | 400 |
| m.max_eangvel | real | 17500 |
| m.current_ramp | real | 100 |
| m.voltage_ramp | real | 15 |
| m.eangvel_accel | real | 6000 |
| m.eangvel_decel | real | 5000 |
| m.eangvel_ctl_kp | real | 0.003 |
| m.eangvel_ctl_ki | real | 0.005 |
| m.eangvel_ctl_kd | real | 1.00E-06 |
| m.current_ctl_bw | real | 0.050000001 |
| m.bemf_ctl_kp | real | 9.600000381 |
| m.bemf_ctl_ki | real | 0.949999988 |
| m.fw_evel_hyst | real | 100 |
| mid.phi.curr_mul | real | 0.300000012 |
| mid.phi.eangvel | real | 300 |
| mid.phi.stall_th | real | 4 |
| mid.l.curr_mul | real | 0.059999999 |
| mid.l.curr_freq | real | 900 |
| mid.r.curr_mul | real | 0.300000012 |
| o.type | integer | 0 |
| o.ekf.q_id | real | 10000 |
| o.ekf.q_iq | real | 30000 |
| o.ekf.q_eangvel | real | 3000000 |
| o.ekf.p0_idq | real | 0.001 |
| o.ekf.p0_eangvel | real | 0.001 |
| o.ekf.cc_comp | real | 0 |
| o.mras.gain | real | 150000 |
| bec.can_pwr_on | boolean | TRUE |
| rcpwm.enable | boolean | FALSE |
| rcpwm.pulse.bot | real | 0.001 |
| rcpwm.pulse.mid | real | 0.0015 |
| rcpwm.pulse.top | real | 0.002 |
| rcpwm.pulse.hyst | real | 2.00E-05 |
| vsi.pwm_freq | real | 47000 |
| exec_aux_command | integer | -1 |
And with GB and props attached:
| uavcan.node_id | integer | 53 |
|---|---|---|
| uavcan.esc_index | integer | 3 |
| uavcan.esc_ttl | real | 0.5 |
| uavcan.esc_sint | real | 0.050000001 |
| uavcan.esc_sintp | real | 0.5 |
| uavcan.esc_rcm | integer | 2 |
| uavcan.esc_revrs | boolean | FALSE |
| rcpwm.ttl | real | 0.300000012 |
| rcpwm.ctl_mode | integer | 2 |
| rcpwm.reverse | boolean | FALSE |
| ctl.spinup_durat | real | 0.5 |
| ctl.num_attempts | integer | 100 |
| ctl.vm_cci_comp | boolean | FALSE |
| ctl.vm_oversatur | boolean | FALSE |
| ctl.pwron_slftst | boolean | FALSE |
| ctl.hard_stop | boolean | FALSE |
| ctl.vm_pppwm_thr | real | 0.949999988 |
| ctl.field_weaken | boolean | FALSE |
| ctl.fw_v_boost | real | 1.200000048 |
| m.num_poles | integer | 28 |
| m.max_current | real | 28 |
| m.max_id_current | real | 0 |
| m.min_current | real | 0.100000001 |
| m.spup_curr_begn | real | 5 |
| m.spup_curr_end | real | 0.6 |
| m.flux_linkage | real | 0.001761633 |
| m.resistance | real | 0.05512942 |
| m.induct_direct | real | 2.39E-05 |
| m.induct_quadrat | real | 2.39E-05 |
| m.min_eangvel | real | 400 |
| m.max_eangvel | real | 17500 |
| m.current_ramp | real | 100 |
| m.voltage_ramp | real | 15 |
| m.eangvel_accel | real | 6000 |
| m.eangvel_decel | real | 5000 |
| m.eangvel_ctl_kp | real | 0.003 |
| m.eangvel_ctl_ki | real | 0.005 |
| m.eangvel_ctl_kd | real | 1.00E-06 |
| m.current_ctl_bw | real | 0.050000001 |
| m.bemf_ctl_kp | real | 9.600000381 |
| m.bemf_ctl_ki | real | 0.949999988 |
| m.fw_evel_hyst | real | 100 |
| mid.phi.curr_mul | real | 0.300000012 |
| mid.phi.eangvel | real | 300 |
| mid.phi.stall_th | real | 4 |
| mid.l.curr_mul | real | 0.059999999 |
| mid.l.curr_freq | real | 900 |
| mid.r.curr_mul | real | 0.300000012 |
| o.type | integer | 0 |
| o.ekf.q_id | real | 10000 |
| o.ekf.q_iq | real | 30000 |
| o.ekf.q_eangvel | real | 3000000 |
| o.ekf.p0_idq | real | 0.001 |
| o.ekf.p0_eangvel | real | 0.001 |
| o.ekf.cc_comp | real | 0 |
| o.mras.gain | real | 150000 |
| bec.can_pwr_on | boolean | TRUE |
| rcpwm.enable | boolean | FALSE |
| rcpwm.pulse.bot | real | 0.001 |
| rcpwm.pulse.mid | real | 0.0015 |
| rcpwm.pulse.top | real | 0.002 |
| rcpwm.pulse.hyst | real | 2.00E-05 |
| vsi.pwm_freq | real | 47000 |
| exec_aux_command | integer | -1 |