Power balance explained
A popular source of confusion when using Telega (or vector control drives in general) is the complicated relationship between the DC link current (the current that flows between the battery and the motor controller) and the phase current (between the controller and the motor).
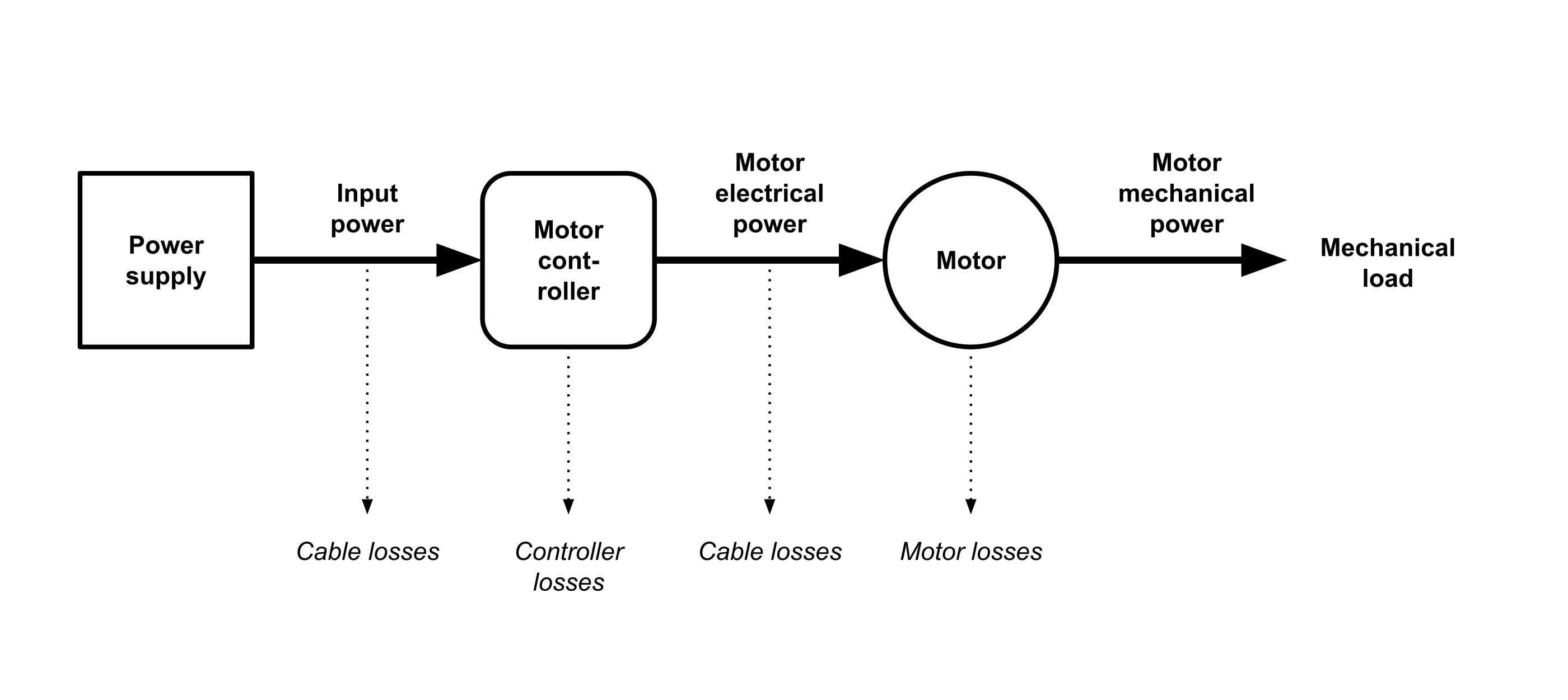
Reviewing the system in terms of power conversions helps to eliminate the confusion.
The DC input power PDC is simply the product of DC voltage and DC current:
PDC = UDC IDC
The active power delivered to the motor can be expressed in terms of the rotating DQ system quantities (simplified, ideal conditions assumed):
PM = 3/2 UQ IQ ⇔ ID = 0
The reactive power is not of interest in this case, so it can be ignored safely.
In general, assuming negligible losses, the following holds true:
PDC ≈ PM ⇔ Ploss ≪ PM
Therefore:
UDC IDC ≈ 3/2 UQ IQ ⇔ Ploss ≪ PM, ID = 0
It is also helpful to mentally picture the motor controller as a step-down DC-DC converter on steroids; for a DC-DC converter the following is valid:
Uin Iin ≈ Uout Iout
Notice the similarity with the above equations.