So I am having issues with poor performance with the GPS.
I passed a number of logs and performed a few tests for the macine I am having issues with.
Here is Randys response.
"Txs for the logs. So the GPS doesn’t seem to be doing very well. 4 satellites is far too few. Normally at least 12 satellites is a good number.
I guess this is a UAVCAN GPS? Perhaps the Zubax GNSS V2? There are two bad things I see:
it’s updating at 10hz instead of 5hz (i.e. too fast)
the logs are short but the PM message shows bad loop timing. We’ve got one report of timing issues when using the Zubax GNSS V2 with NuttX but I see you’re using ChibiOS… could you produce a longer log so we can see better if the timing issues persist? At least 3 minutes of logs would be nice to have. you can set LOG_DISARMED = 1 to save yourself from having to arm the vehicle."
so is there a way to control the update time. To take it down to 5hz and not 10 as its running now.
So got confirmation today that the Zubax is not working. Its not a 10hz versus 5hz issue. The GPS is not working.
I have the the Can port tool coming , it’s at the post office now. I will see about flashing it with new software and resetting the default values unless there is a simple way of doing it.
Pretty clear to me this GPS is Fubar.
I am putting it on the shelf. Going back to my regular GPS.
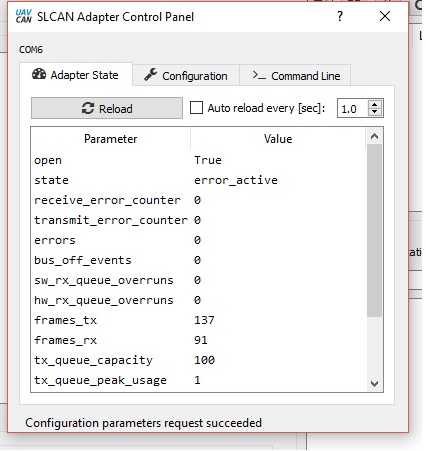
I got the UAVCAN tool and it just tells me the gps is in an error state.
Not sure what options I have. I have no idea how to now connect to it or reset it to clear the error.
First of all, related to your question about the reporting rate: in the datasheet you will find the configuration parameter uavcan.pubp-fix, which does exactly what you need.
Regarding the failing unit, could you please share your order number and describe if the unit was exposed to any unusual stresses or extreme temperature variations? We’ve received a similar report from another user not so long ago, could be a damaged batch.
Hey Pavel.
No worries. You have a life to enjoy like everyone else.
uavcan.pubp-fix, sorry not sure I understand what this done.
As for the unit itself. I can’t say about what happened in transit. But I know its had no issues since its been here. It’s secured to a frame that I handle with extreme care as its my baby. The temperature in the room is reasonable and constant so I don’t imagine there are any issues there.
The order number
Titan Elite, Inc. - Order 4159
IS there a way to reset this so I can clear the error and connect. It’s so frustrating. I really want this to work.
Ok found the data sheet. I get what this does now.
uavcan.pubp-fix
Seems that’s not the issue at this point it’s something more serious.
If you have any instructions on how to get the unit reflashed or reset let me know. At this point I can’t break it anymore then it’s broke. lol
We’d really like you order number and, if possible, the unique ID of the device. You can get the latter either via the command line by running zubax_id, or from the UAVCAN GUI tool by double-clicking at the node in the node view widget (left hand side of the main window).
The unique ID is a long 128-bit string, e.g. 2c002b0004514d593833302000000000. We’d like to see it so we could inspect the manufacturing log at Zubax Device Info
I have contacted the Titan Elite, they will be in touch with you shortly. Apologies for the inconvenience; we are investigating this issue now.
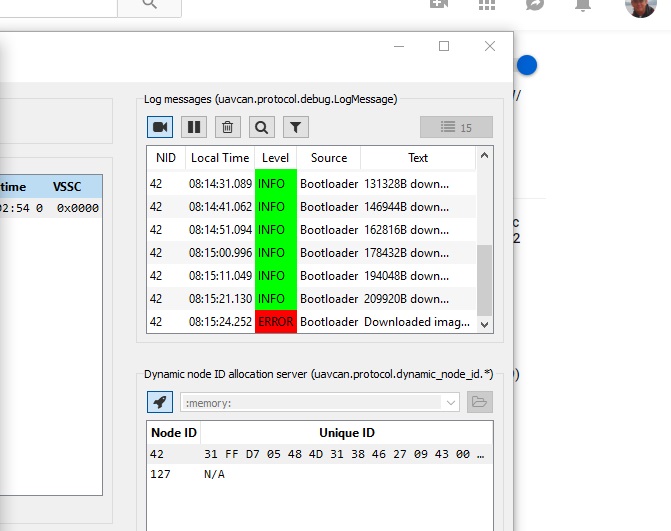
Ha, this is not what I expected, at all. The device indicates that it doesn’t have a firmware installed. Have you been attempting to update its firmware?
You need to recover it to the original state. In order to do that, please download the binary image from https://files.zubax.com/products/com.zubax.gnss/com.zubax.gnss-2.2-4.1.62c8d4a.application.bin, then open the GUI tool, double-click on the node, and click the Update Firmware button. The application will ask you to provide the file, use the one you just downloaded. After that, everything should get back to normal.
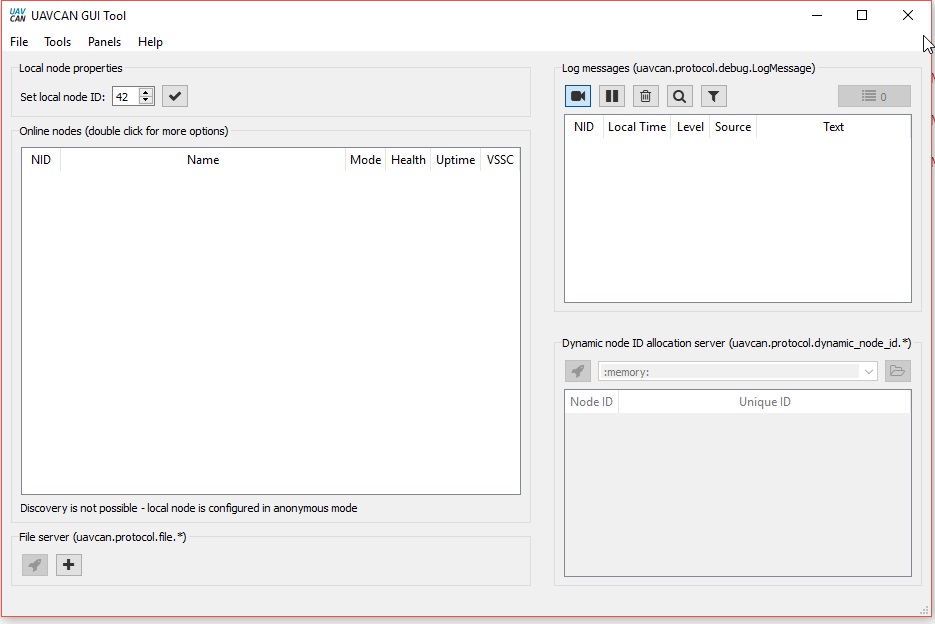
The device doesn’t how in the node list. See the attached image.
I got the canport device so I could do an upgrade, but never got that far. As you can see if doesn’t show up, it did for a split second and hasn’t shown since.
In this image the id is set to 42 because thats what I saw the first time…but that makes no difference.
It won’t show up because it needs a dynamic node ID. In order to allocate one, assign a local node ID to the GUI tool by clicking the check mark in the upper-left part of the window (next to “Set local node ID”), then enable the dynamic node ID allocator by clicking the launch button in the bottom-right part of the window (“Dynamic node ID allocation server”). After that, the node will get back online, and you can upload the firmware.
Yes that was easy to do.
Do I need to upload firmware as well or was that everything.
If so then today I will take it outside and see if it works.
If it doesn’t then I am at a loss. I was thinking that if I could get a param file from someone that I could compare to my unit and see if there are any CAN or GPS settings that are different. I could then rule out a config issue.
First I need to test it outside today. Will let you know the results.
Okay. You can test it using the GUI tool as well, by using the Subscriber tool under the Tools menu (select the data type uavcan.equipment.gnss.Fix2 to see the performance of the unit).
Do I need to upload firmware as well or was that everything.
You should click the firmware update button in the GUI tool as I described earlier and wait for the upload process to complete.