On our motor test setup we’re currently using rather long dc wires.
Since I didn’t want to run into phase current limitations I foolishly set the motor.current_max to 80A not having in mind that the spinup_current_pu is a fraction of that value. I had kept that value at its default value of 50%, thus having a spinup with 40A which then cut off rapidly. After the spinup the motor stopped and Telega reports an hardware fault now.
Our guess is that the sudden current drop in combination with the long wires resulted in a voltage spike which destroyed some of the hardware components on the myax board.
If this is the case, what components would be effected by that first? There are no obvious damages on the board itself, but we are considering replacing the destroyed parts with parts from another bricked myxa if that is possible.
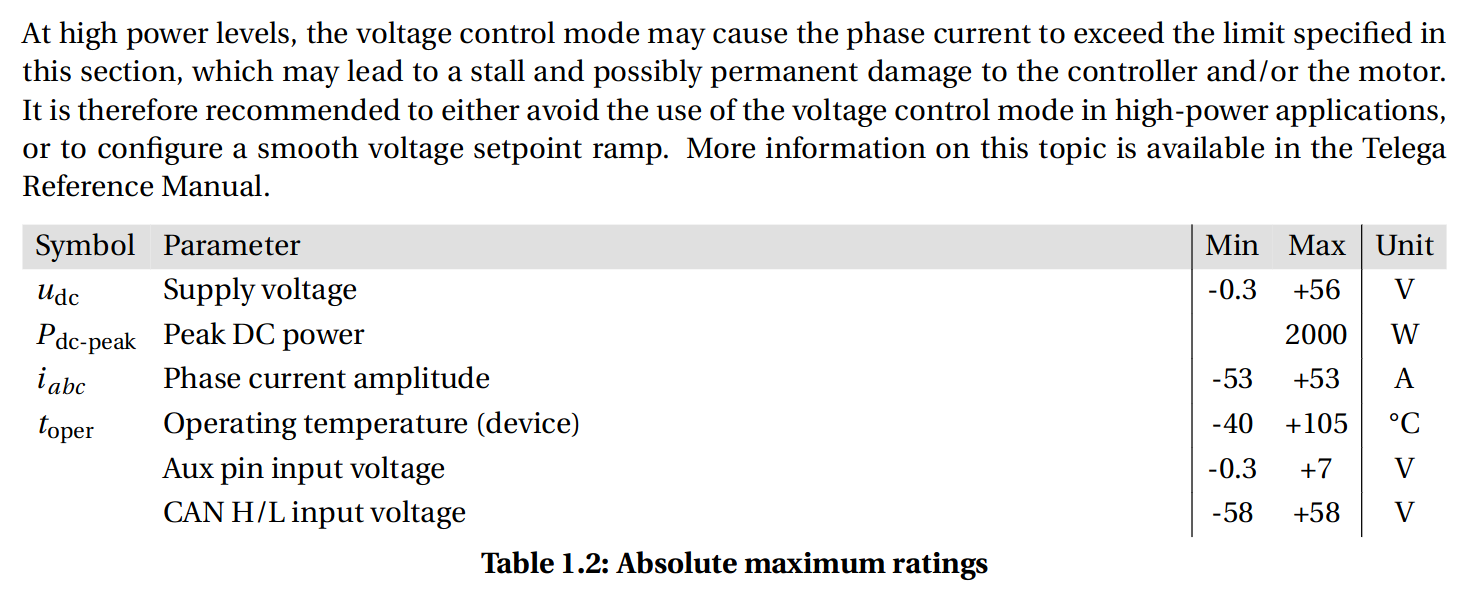
The main danger of setting the phase current setpoint to a high value is that it may exceed the dynamic range of the phase current measurement front-end. This condition will cause the current controller to overload either the inverter or the motor, or both. The normal operating region of the phase current measurement circuit for Myxa is \pm{}50A; brief excursions up to |53| A are acceptable, although the front end exhibits non-linear gain in this mode. The maximum setpoint shall not exceed |45| A. Here is a relevant excerpt from the datasheet:
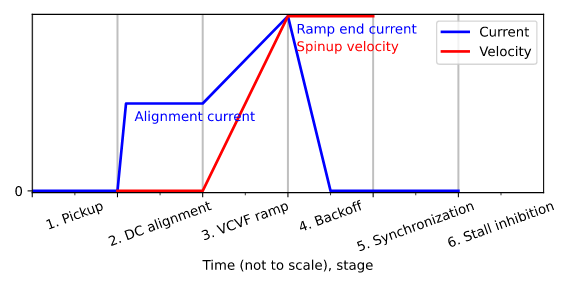
Setting the maximum current to 80 A is risky because it allows the controller to ramp up the phase current up to that value after stage 5. Synchronization of the spinup sequence is finished, which will likely cause saturation and overload:
If the failure is caused by saturation, then the most likely victim is one of the power stage transistors. The part number of the transistors is Infineon BSC040N08NS5ATMA1.
If the failure is caused by a voltage spike, then the most likely victim is the step-down DC-DC converter; however, it does not seem to be the case here as the board remains otherwise operational, so the DC-DC converter must be functional.
You can try and investigate this by running the self-test command: