Hi
This is the config we used and these are the results:
aux.ctl.1_rcpwm.deadband: 9.999999747378752e-05
aux.ctl.1_rcpwm.rev_mid_fwd: [0.0010000000474974513, 0.001500000013038516, 0.0020000000949949026]
aux.ctl.2_voltage.deadband: 0.15000000596046448
aux.ctl.2_voltage.rev_mid_fwd: [0.0, 1.649999976158142, 3.299999952316284]
aux.ctl.dead0: false
aux.ctl.mode: ''
aux.ctl.type: 0
aux.power_output: false
aux.pull: 1
drive.current_brake_pu: 0.20000000298023224
drive.flux_weakening.bemf_pid: [4.0, 2.0, 0.009999999776482582]
drive.flux_weakening.voltage_boost: 1.0
drive.observer.0_ekf.proc_noise: [1000000.0, 3000000.0, 100000000.0]
drive.observer.0_ekf.sched_factor: [0.800000011920929, 0.949999988079071]
drive.observer.1_mras.gain: 1000.0
drive.observer.type: 0
drive.pre_calibrate: false
drive.runner.0_ramp.spinup_current_pu: [0.800000011920929, 1.0]
drive.runner.0_ramp.spinup_duration: [0.10000000149011612, 0.0, 0.20000000298023224, 0.0, 0.0010000000474974513, 0.10000000149011612]
drive.runner.0_ramp.velocity_stall_spinup: [0.05, 5]
drive.runner.1_passive.delay: 0.20000000298023224
drive.runner.1_passive.velocity_off_on: [10.0, 20.0]
drive.runner.type: 0
drive.stall_limit: 20
drive.velocity_ctl.1_pid.feedforward: [0.0, 0.0]
drive.velocity_ctl.1_pid.gain: [0.0, 0.0, 0.0]
drive.velocity_ctl.2_indi.acceleration_pi: [50.0, 0.0]
drive.velocity_ctl.2_indi.mass: 9.999999747378752e-06
drive.velocity_ctl.acceleration: [-2000.0, 2000.0]
drive.velocity_ctl.type: 2
drive.voltage_clipping: false
mns.deadman_timeout: 0.5
mns.local_timestamp: false
mns.pub_interval_min: 0.05000000074505806
mns.ratiometric_setpoint_min: 0.0
mns.ratiometric_to_absolute_mul: 0.0
mns.setpoint_index: 0
mns.status_period: 1.0
motor.current_ctl_bwr: 0.03999999910593033
motor.current_max: 110.44999694824219
motor.current_ramp: 1000.0
motor.flux_linkage: 0.0049230000004172325
motor.inductance_dq: [1.340000017080456e-05, 1.340000017080456e-05]
motor.mechanical_ratio: 46
motor.resistance: 0.005100000184029341
motor.thermistor_v2k: [104.47000122070312, 71.43000030517578, 54.9900016784668]
motor.voltage_ramp: 20.0
servo.profile.acceleration: [-200.0, 100.0]
servo.profile.jerk: 2000.0
servo.profile.velocity: [-50.0, 50.0]
standby.brake_voltage: .nan
sys.debug: false
sys.golden: sys. vsi.
uavcan.can.bitrate: [1000000, 0]
uavcan.can.count: 1
uavcan.node.description: ''
uavcan.node.id: 125
uavcan.pub.compact.id: 65535
uavcan.pub.compact.prio: 3
uavcan.pub.dq.id: 1010
uavcan.pub.dq.prio: 3
uavcan.pub.dynamics.id: 1011
uavcan.pub.dynamics.prio: 3
uavcan.pub.feedback.id: 65535
uavcan.pub.feedback.prio: 3
uavcan.pub.power.id: 1012
uavcan.pub.power.prio: 3
uavcan.pub.status.id: 65535
uavcan.pub.status.prio: 4
uavcan.pub.temperature.id: 1013
uavcan.pub.temperature.prio: 5
uavcan.srv.low_level_io.id: 65535
uavcan.sub.readiness.id: 65535
uavcan.sub.setpoint_dynamics.id: 65535
uavcan.sub.setpoint_rat_torque.id: 1101
uavcan.sub.setpoint_rat_torque_u9.id: 65535
uavcan.sub.setpoint_rat_velocity_u9.id: 65535
uavcan.sub.setpoint_rat_voltage.id: 65535
uavcan.sub.setpoint_rat_voltage_u9.id: 65535
uavcan.sub.setpoint_servo.id: 65535
uavcan.sub.setpoint_velocity.id: 1102
vsi.activation_latency: 0.009999999776482582
vsi.bridge_resistance: [0.0020000000949949026, 0.003000000026077032, 0.0020000000949949026, 0.003000000026077032, 0.0020000000949949026, 0.0020000000949949026]
vsi.calibration_duration: 2.0
vsi.dc_voltage_gain: 18.799999237060547
vsi.hw_fault_latency: 0.10000000149011612
vsi.phase_current_gain: [100.0, 100.0, 25.0, 25.0]
vsi.phase_current_gain_attack_decay: [1.5, 0.36000001430511475]
vsi.phase_current_gain_decay_time: 0.10000000149011612
vsi.phase_current_sampling_window: 1.9000000293090125e-06
vsi.phase_current_stderr: [0.30000001192092896, 0.30000001192092896, 0.20000000298023224, 0.20000000298023224]
vsi.pwm_dead_time: 0.0
vsi.pwm_freq_mul_log2: 0
vsi.shortest_time_in_disabled_state: 1.9999999494757503e-05
vsi.swap_ab: false
vsi.thermistor_v2k: [223.14999389648438, 100.0, 0.0]
vsi.tick_freq: 29402.15625
zubax.cookie: ''
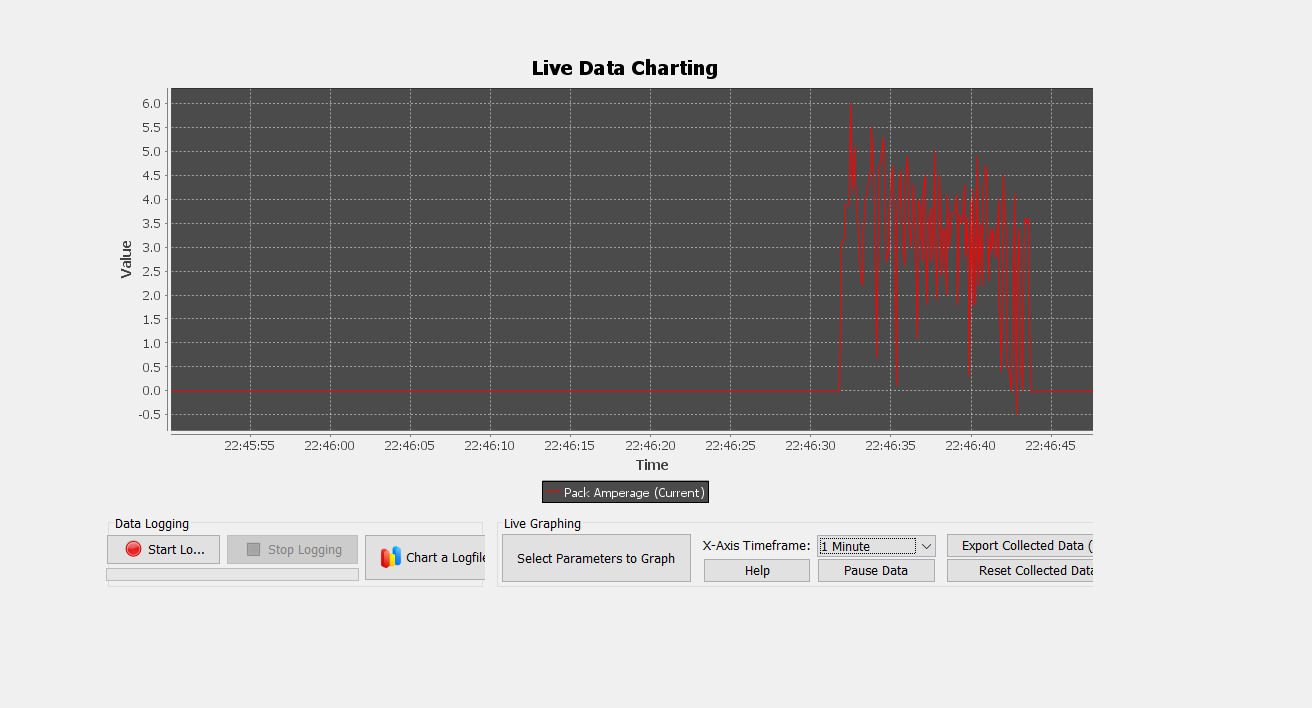
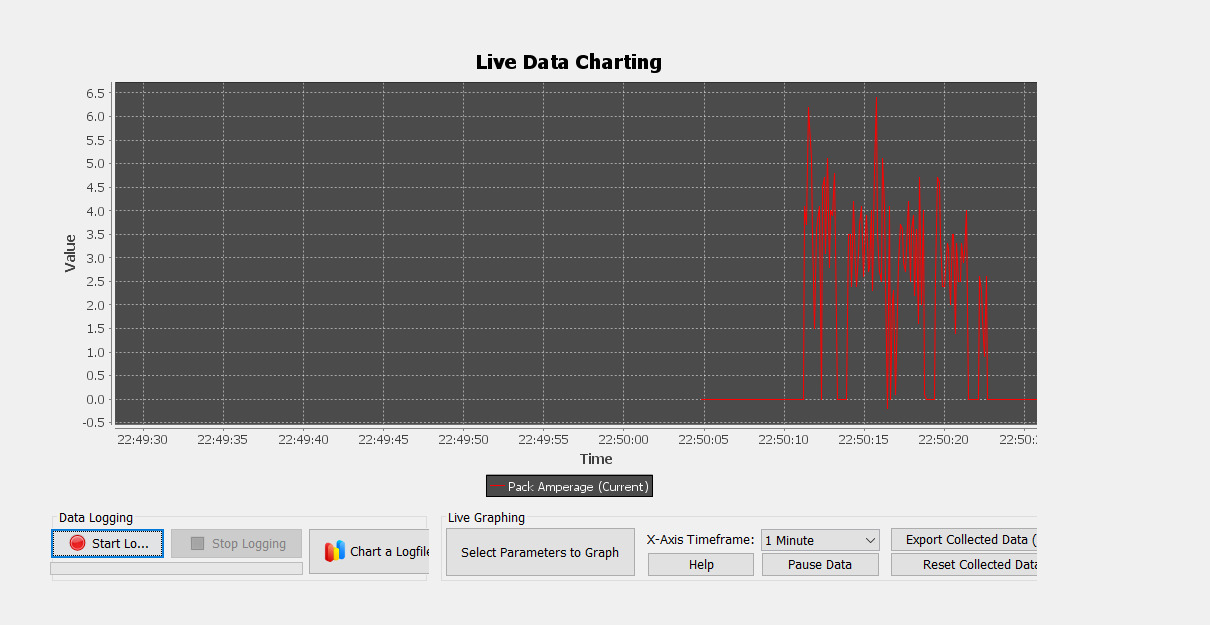
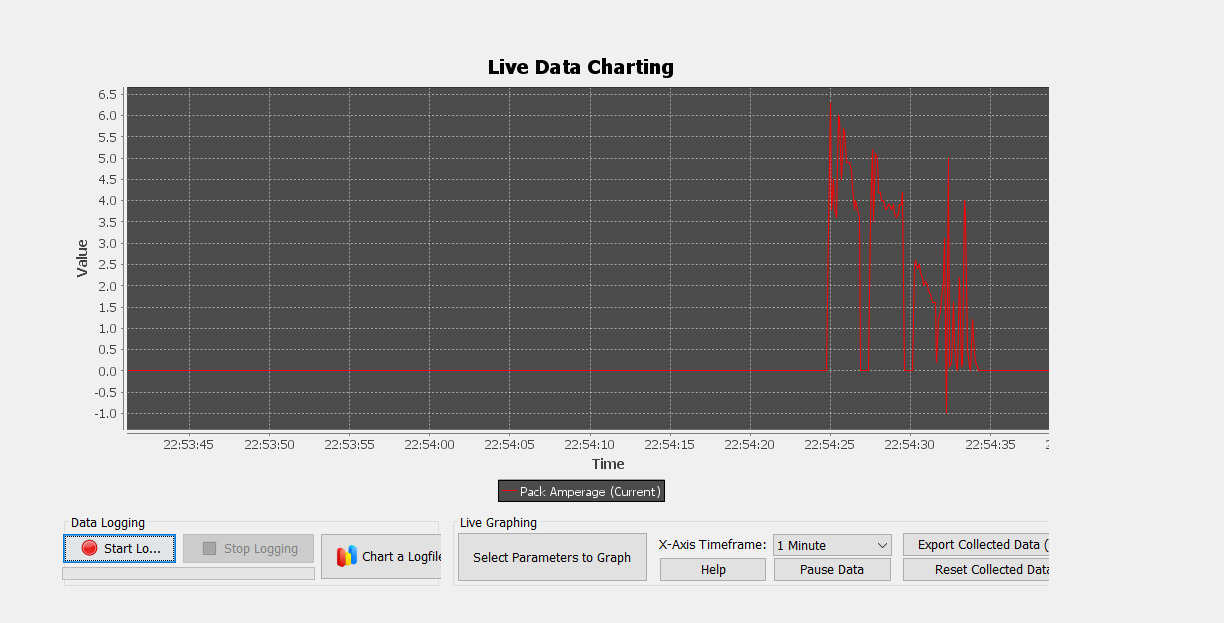
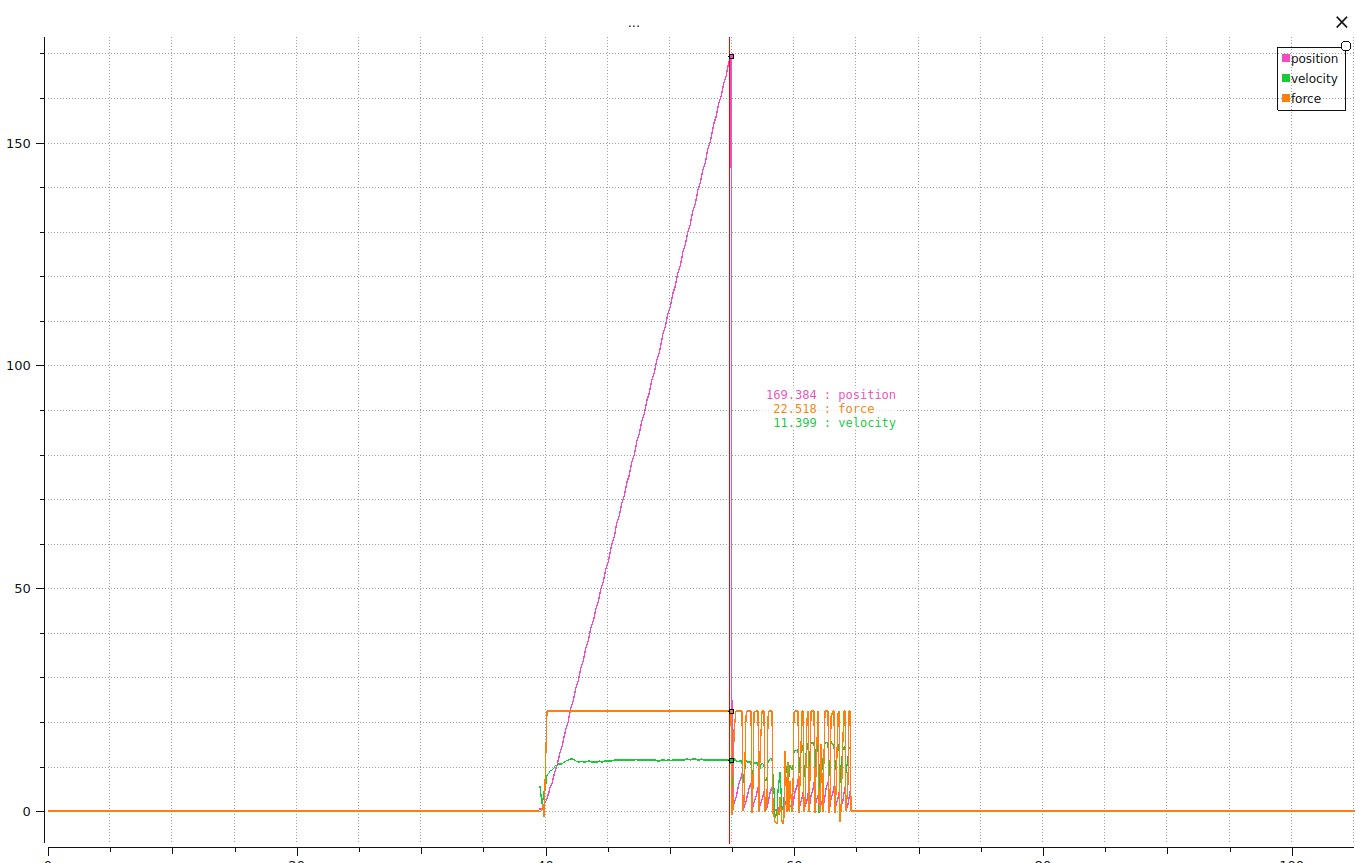
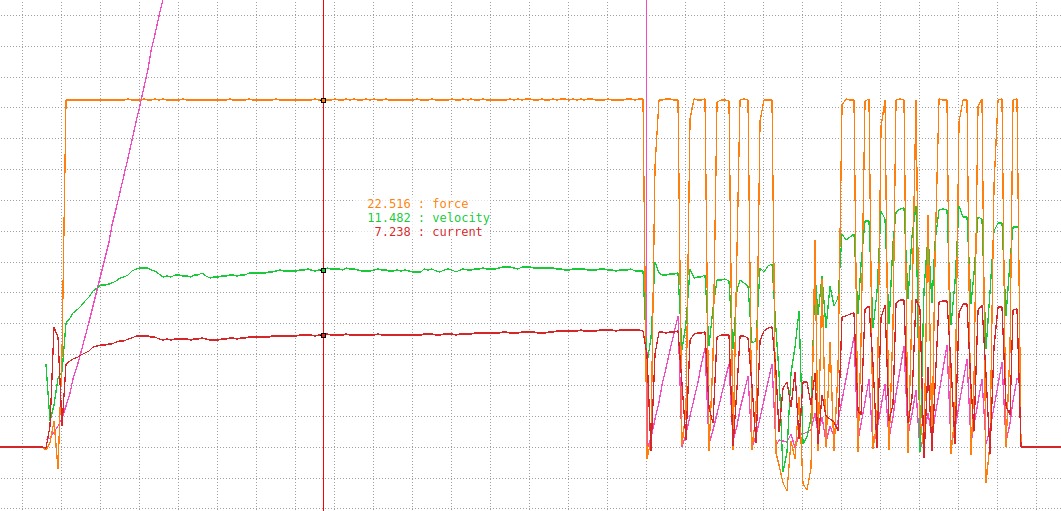
Here is a video running in torque control mode. We initiated the command when the motor was already freewheeling. As you can see the motor runs for a while and then starts to stall (becomes jerky) until it comes to a complete stop.
We are using torque control mode. A thing that seems weird is that increasing the torque command from 0.6 to 1 doesn’t make a difference, actually the controller works better with a request of 0.6 torque.
For a 0 torque command the motor is not freewheeling and trying to actually start. We don’t know why.
When trying to get some regenerative braking, driving the motor forward and requesting a negative torque, -0.6 it just jerks the motor a bit and then pauses.
What we tried from a configuration stand point is changing the drive.runner.0_ramp.velocity_stall_spinup. We found that [0.1, 5] seems to work for us at the moment. Decreasing the second parameter seemed to improve pick up when the motor was already spinning.
We also reduced the motor.current_ramp parameter. Decreasing it to the current value helped with the controller reaching a steady state faster when the motor was already rotating.
If you have any tips on what we can try configuration wise of how we can debug the current setup, it would be highly appreciated.