Sapog is an advanced open source sensorless PMSM/BLDC motor controller firmware designed for use in propulsion systems of electric unmanned aircraft (UAV) and watercraft.
Telega is more advanced and more efficient motor control firmware, increasing ESC working time from battery. In addition Telega ensures minimum torque ripples due to sinusoidal currents.
Both firmwares provide high reliability of the propulsion systems.
But this advantages of motor control algorithms have speed restrictions. There are two reasons for it.
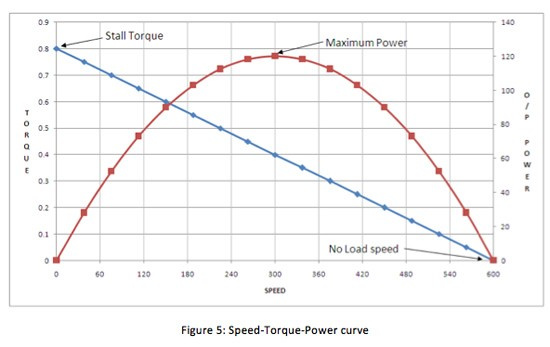
- As you can see from the figure below motor torque is reducing while speed is increasing (considering the input power is constant and maximum). So at particular point we need to increase power and decrease efficiency to maintain rotor rotating.
- At high speeds the efficiency of motors is dramatically falling down due to Iron losses. Iron losses are proportional to the magnetic field rotation frequency.
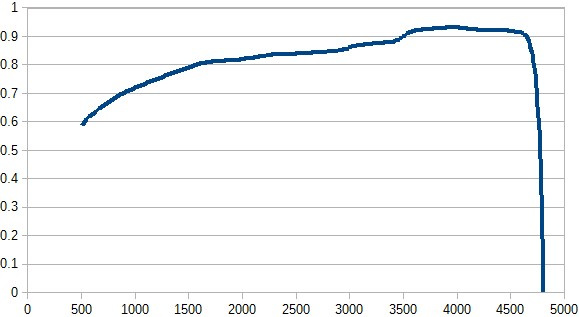
So at high speeds there’s no chance to obtain high efficiency and high reliability. And advanced algorithms become useless. In common ESCs this problem is resolved by means of applying full voltage to motor windings without modulation and without any feedback (so-called “one pulse mode”). Motor spins at high speeds but with high power consumption, high torque ripples and disturbances, high EMI radiation. And there’s strong possibility of rotor stall.
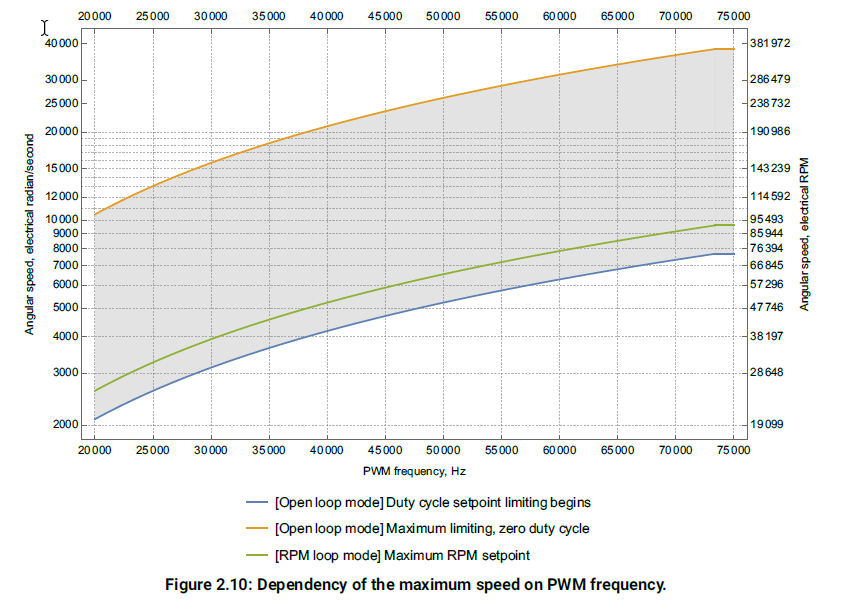
This not reliable and efficient “one pulse mode” is not embedded in Telega and Sapog firmware. And this firmwares have rotor speed restrictions. Maximum speed depends on PWM frequency. On Sapog V2.0 firmware can be obtained 90000 rpm on 2poles motors at 75 kHz PWM frequency.
Zubax Team with our partners now is working on motor’s design optimization for racing drones, allowing to obtain high efficiency control at rotor speeds higher then 14000 rpm.