Hi All,
I have been trying to get these AD0505s working with ardupilot. After lots of troubleshooting i worked out they have been shipped/ordered with the Cyphal firmware V1.xxxx and we needed V0.xxxx for UAV Can.
So i bought a babel, more time wasted. I emailed Pavel who gave me the link to how to update. This one here…. pretty simple i thought Updating AmpDrive firmware using Yukon -
So i downloaded the latest uavcan firmware , this one here under V0.
com.zubax.telega-1-0.6.cd758ab7.compound
Wehn connecting to yukon i could see all 8 nodes runing V1.0 firmware. After installing the update i got a warning. And it was stuck on firmware update.
Now i have them flashing red after a power cycle and no way of connecting to the Yukon. Cant see them as nodes anymore. I tried this twice. The third is stuck in bootloader and fails an update every time.
Can someone please help, as when i emailed i got a “post it on the forums” response which again isn’t really helpful when your needing support from the manufacturer.
Really hoping we can turn this around as it’s an integral part of our build. Otherwise it might be back to the drawing board
It seems that the update went well and the devices are now running Telega v0 with UAVCAN v0 (aka DroneCAN) support. Please use the UAVCAN GUI Tool or the DroneCAN GUI Tool to interact with the nodes. They are no longer accessible via Cyphal because firmware v0 supports UAVCAN v0/DroneCAN only.
If you want to go back to v1 with Cyphal, you need to upload the correct firmware binary using the GUI tool.
Hope this helps!
See video
Nodes are not responding even when individual plugged into drone can.
I think somehow the firmware upgrade is failing. Is there anyway to assure a correct rollback to V0.
Do I have to start at the first V0 firmware or can I upgrade straight to the latest V3 firmware.
They say they reset the parameters? What should I put back in. I really just need ESCs that are plug and play with ardupilot.
I’ll be using T motors U8 pro KV100. Utilising 28x9.2 propellors. Is there anyway special parameters I need from the manufacturer?
The perfect thing would be to be able to flash the firmware then upload a parameter file so we can do this in mass
Hi Jeff!
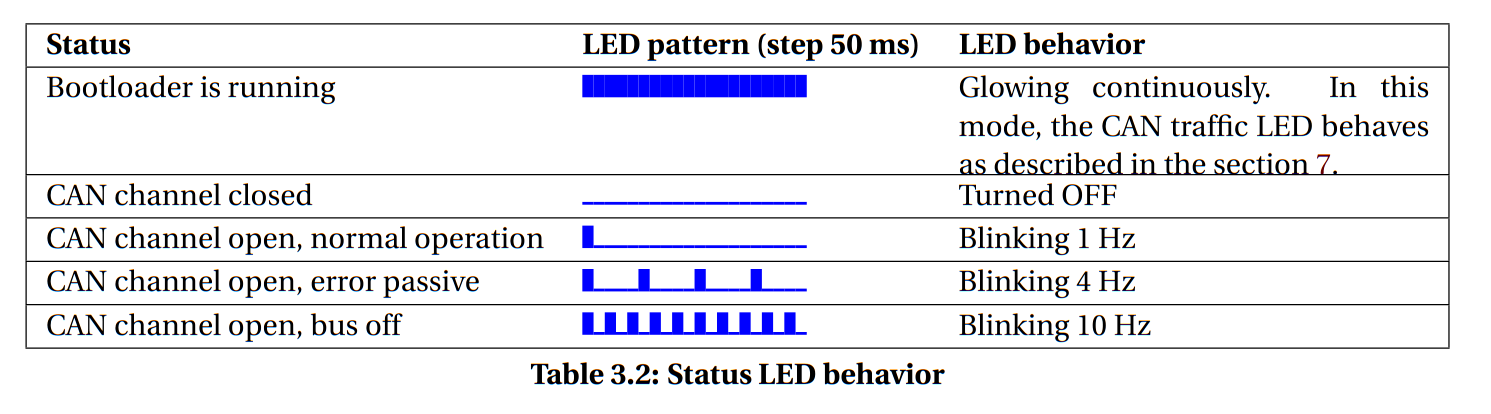
According to the blinking pattern, the devices are running Telega v0. The firmware has been installed correctly, otherwise it wouldn’t pass the start-up integrity check, and the blinking pattern would be different.
There is no v3 firmware available, only v0 (where v0.6 is the latest) and v1 (where v1.0 is the latest). You might be referring to v0.3, but for the purposes of this discussion it is equivalent to v0.6.
Yes, the parameters are reset when migrating between v0 and v1, this is expected. A v0 firmware will attempt to automatically identify the CAN bitrate and obtain a node-ID from a PnP allocator. You are already doing the necessary steps when starting the GUI tool, so it should just work.
However, I am noticing in your video that the CF1 Babel is flashing the blue LED four times per second, indicating that it resides in the ERROR PASSIVE state, suggesting a CAN wiring or configuration problem. For context you can refer to https://files.zubax.com/products/com.zubax.babel/Zubax_Babel_Datasheet.pdf
I have a few requests to help you further:
- Please show me how exactly the CAN bus is wired, either on a schematic or with close-up photos.
- Please scope the bus with a logic analyzer or an oscilloscope to check bitrates and the signal integrity, preferably with a protocol decoder. You can skip this if you don’t have the equipment.
- Show the traffic detected on the bus. In the video you launch the bus monitor tool but you don’t actually start it so it’s not doing anything; for that, you need to press the capture icon on top. For better results use
candump on GNU/Linux with SocketCAN instead.
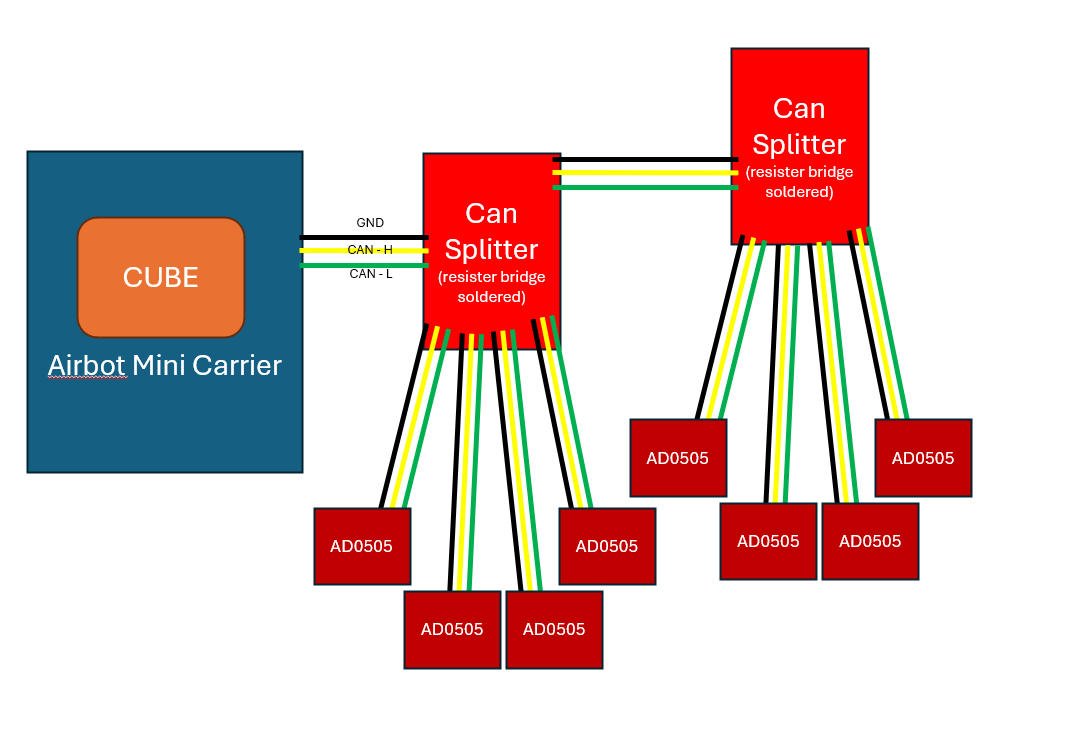
See wiring diagram.
Im well aware this isn’t the perfect can network, but all wires are under 5-7cm from each splitter. The wires joining splitters are 20cm. All solder bridges are joined and when testing with a multimeter when connected to the carrier board i get 60ohms on the first splitter, and 120 ohms on the second when joined so the resisters across the network seem fine.
See video of update on one esc then accessing drone can Drone Can - this is one after an “update to v0” but the LED just shows constant yellow now. Like it is stuck in software update in drone can. Good news is it must have moved to UAVCAN as i can see it now in the network.
Bad news. The one that kept throwing reds i could not get it to do anything through this process, checked wiring reran Yukon annd drone can. Everything the same as the other times i tried. etc. During the process of checking wiring it fried and sparked on a standoff so now is dead :(( But either way was weird we couldnt get it to communicate vs the others.
I’m really hoping to get this working so we can buy some more and double down on zubax. The form factor is right, we just hope this can work. Even if I have to go PWM. We need it to be repeatable
Note videos are reversed in order, click the bottom one first which shows yukon update, then the top one is the drone can interface.
Ok update.
Hadn’t heard from anyone for a week so dived in.
To update use the application firmware extension not the compound.
This resulted in red lights.
Drone can was able to pick it up but it was stuck in software update. A power cycle removed the software update cycle after the firmware was updated.
This resulted in red flashing lights as per the first video.
Then I was able to fetch the parameters and download them. Using a text file format I was able to bulk modify them and get them to a working status as after the firmware they had blank or missing parameters.
Now I’m at the stage of trying to choose the right parameters.
RPM vs Torque?
What parameters for the U8? Any pre loaded parameters out there?
There is so many to load that I’m worried I’ll miss something critical.
Failure!
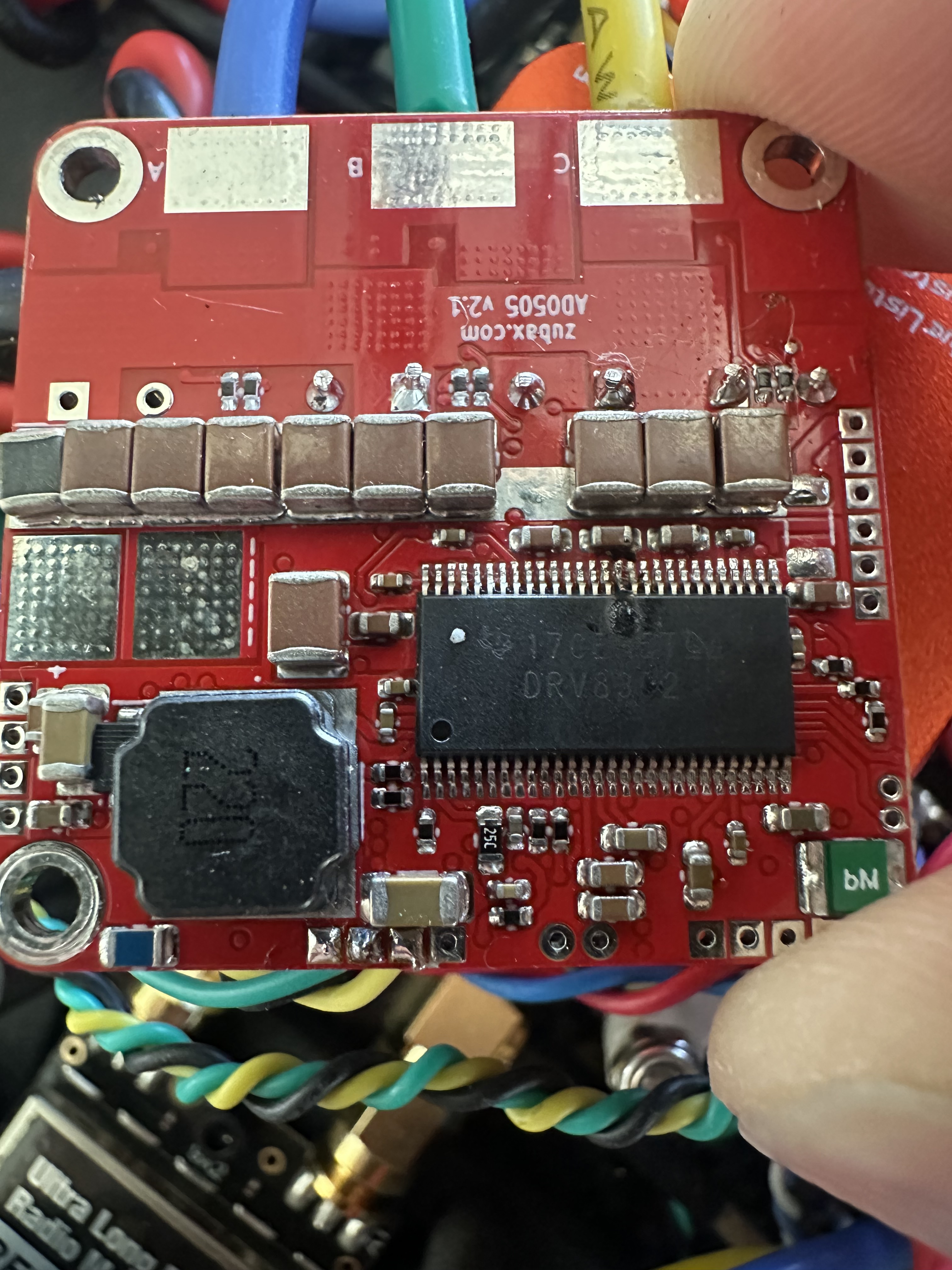
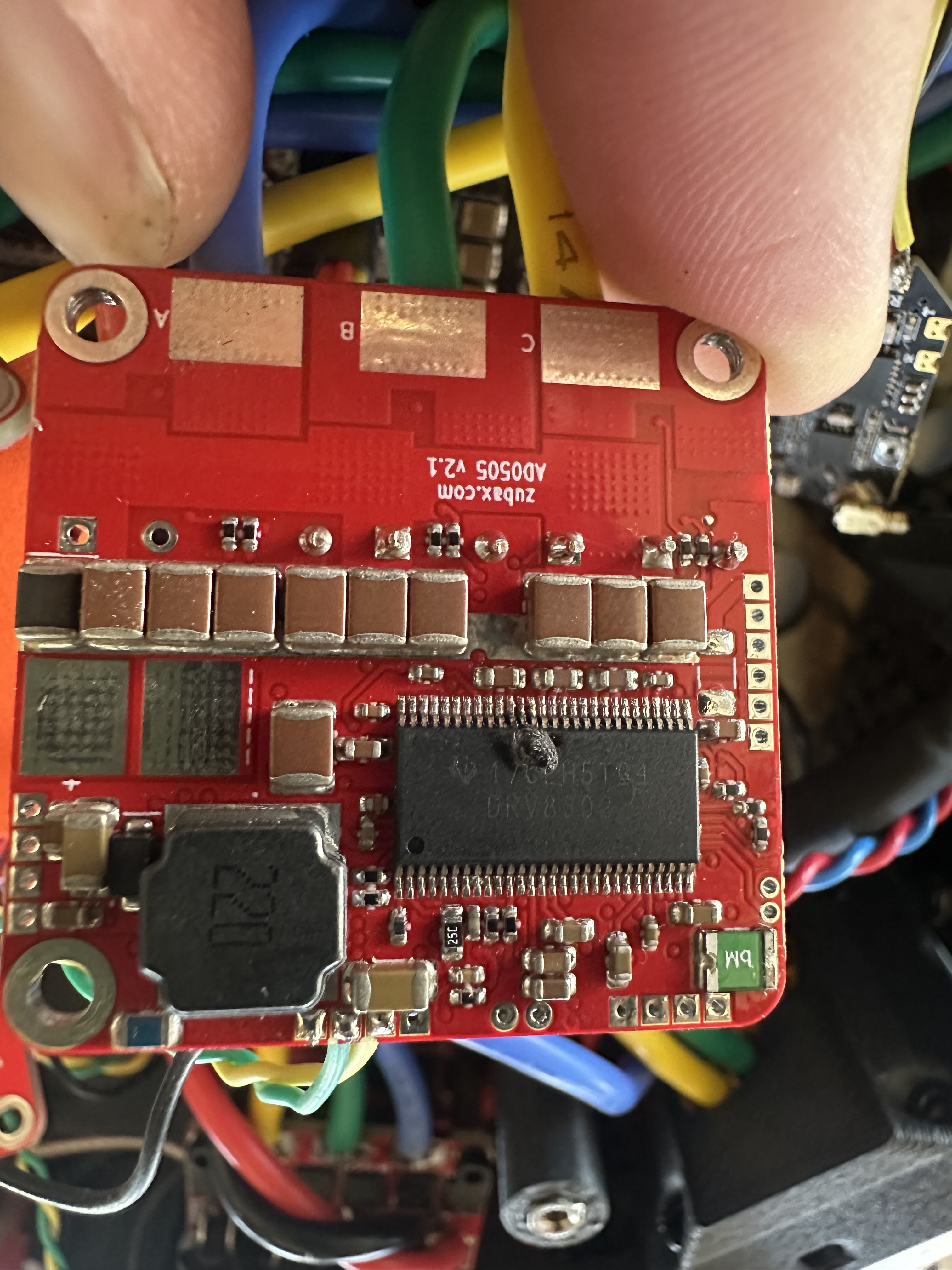
Now after a motor test in Ardupilot I have had two similar failures in each modules. A Loud POP and smoke out of two.
see photos below, both failed in the exact same place. These are two seperate ESCs out of 8.
now I’m down to 5 out of 8 ESCs.
Have been trying parameters and this is what I have ended up with but can’t get the motors to spin in Ardupilot or in Drone Can.
Best I can get is a small sudden jolt out of the motors when I increase RPM and the ESCs reset themselves.
Also in Ardupilot, I can see all ESCs now but can’t get any temp info on all of them. I can only get temp info on 1.
Below is current parameters.
And Photos of the two that have failed.
uavcan.node_id 10
uavcan.esc_index 0
uavcan.esc_ttl 0.5
uavcan.esc_sint 0.05000000074505806
uavcan.esc_sintp 0.5
uavcan.esc_rcm 1
uavcan.esc_revrs False
rcpwm.ttl 0.30000001192092896
rcpwm.ctl_mode 2
rcpwm.reverse False
ctl.spinup_durat 0.5
ctl.num_attempts 100
ctl.vm_cci_comp False
ctl.vm_oversatur False
ctl.pwron_slftst False
ctl.hard_stop False
ctl.vm_pppwm_thr 0.949999988079071
ctl.field_weaken False
m.num_poles 36
m.max_current 30.0
m.max_id_current 6.0
m.min_current 1.2000000476837158
m.spup_curr_begn 2.0
m.spup_curr_end 1.0
m.flux_linkage 0.047200001776218414
m.resistance 0.17000000178813934
m.induct_direct 8.499999967170879e-05
m.induct_quadrat 8.499999967170879e-05
m.min_eangvel 350.0
m.max_eangvel 12000.0
m.current_ramp 1000.0
m.voltage_ramp 15.0
m.eangvel_accel 500.0
m.eangvel_decel 300.0
m.eangvel_ctl_kp 0.009999999776482582
m.eangvel_ctl_ki 0.009999999776482582
m.eangvel_ctl_kd 9.999999974752427e-07
m.current_ctl_bw 0.05999999865889549
m.fw_bemf_ctl_kp 9.600000381469727
m.fw_bemf_ctl_ki 0.949999988079071
m.fw_eangvel_hys 100.0
m.fw_volt_boost 1.2000000476837158
load.linear_coef 0.0
load.square_coef 0.0
mid.phi.curr_mul 0.30000001192092896
mid.phi.eangvel 300.0
mid.phi.stall_th 4.0
mid.phi.curr_bw 0.009999999776482582
mid.l.curr_mul 0.05999999865889549
mid.l.curr_freq 900.0
mid.l.curr_bw 0.0010000000474974513
mid.r.curr_mul 0.30000001192092896
o.type 0
o.ekf.q_id 14000.0
o.ekf.q_iq 43000.0
o.ekf.q_eangvel 4000000.0
o.ekf.p0_idq 0.0010000000474974513
o.ekf.p0_eangvel 0.0010000000474974513
o.ekf.sched_curr 20.0
o.ekf.sched_ind 0.800000011920929
o.ekf.sched_flux 0.949999988079071
o.ekf.cc_comp 0.0
o.mras.gain 150000.0
bec.can_pwr_on False
rcpwm.enable False
rcpwm.pulse.bot 0.0010000000474974513
rcpwm.pulse.mid 0.001500000013038516
rcpwm.pulse.top 0.0020000000949949026
rcpwm.pulse.hyst 1.9999999494757503e-05
vsi.pwm_freq 32000.0
m.temp_sens_typ 0
vsi.curr_shunt 0.003000000026077032
vsi.tr_rds_on 0.006000000052154064
vsi.tr_ton_ns 14.0
vsi.tr_toff_ns 25.0
vsi.divider_up 35600.0
vsi.divider_lo 2000.0
exec_aux_command -1
Hi Jeff, apologies for the absence. I just replied via email that it might be a good idea to have a call; I should post a brief update here afterward for the benefit of posterity.