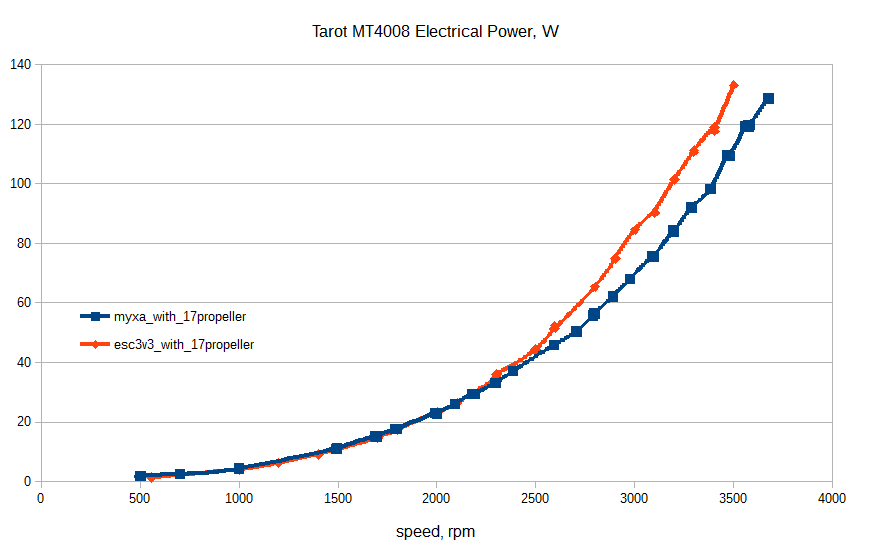
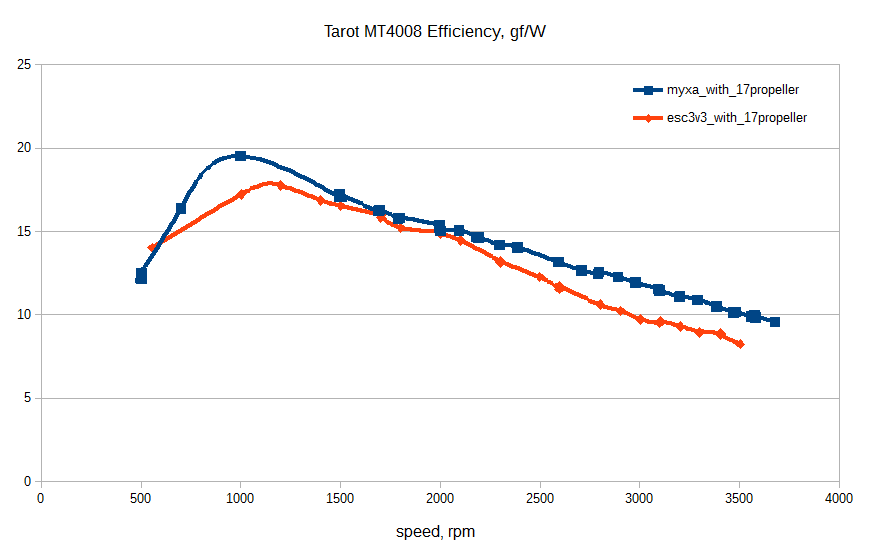
At higher speeds and loads Myxa provides up to 20% efficiency increase. Efficiency is generally lower at lower battery voltages due to higher currents and bigger static losses. Myxa is more efficient at power ranges higher than 100 W.
During the experiment, we observed that at high speeds motor with 1760 propeller generates high sound noise. And this noise is lower while the motor is driving by Myxa ESC due more smoothed currents and torque forms.
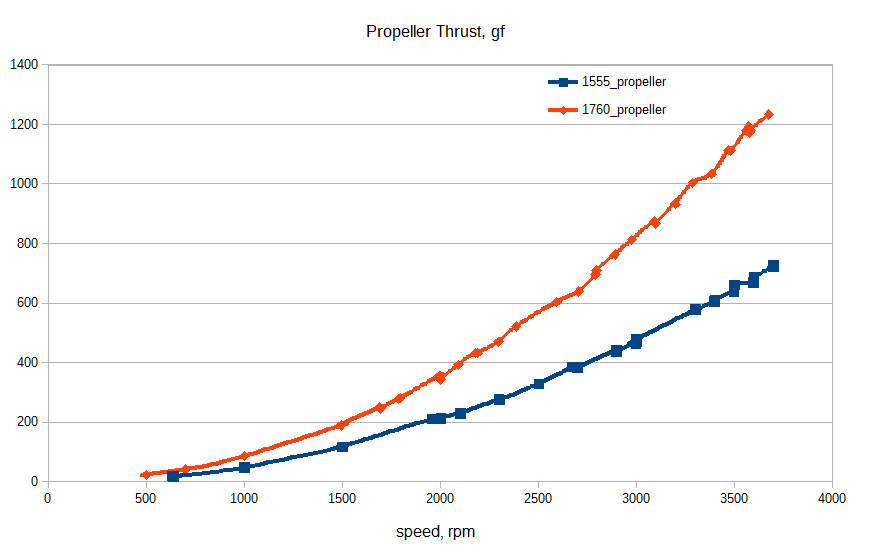
You can compare Thrust characteristic of 1555 and 1760 propeller on the figure below.
Hi Venkatesh,
First of all, I recommend to read this topic and check if Myxa is properly parametrized. For example, if you performed motor identification without a propeller. And I also recommend these parameters (they don’t have a big influence on power consumption, but increase stability) to set these values:
m.current_ctl_bw = 0.07 [unitless ratio]
o.ekf.q_eangvel = 300000 [(radian/second)^2]
o.ekf.q_id = 10000 [ampere^2]
o.ekf.q_iq = 100000 [ampere^2]
m.voltage_ramp = 26 [volt/second]
After Motor Identification procedure these parameters should be roughly:
m.phi_milliweber = 1.45
m.ld_microhenry = 37.8
m.lq_microhenry = 37.8
m.rs_ohm = 0.096
You also should check if you properly set up your testbench. It might be not calibrated. How much power consumption on your stand differs? It also could depend on the particular motor bandle. I’m not sure, that they have absolutely same characteristics.