Hi, i’m buidling UAV using FMU (Pixhawk V5X) - PX4 Autopilot and 4 Zubax Myxa ESCs for controlling motor (Flycat i-rotor 5010-750kv) via Cyphal. Which motor control mode should I use?
In my case:
FMU PX4 Autopilot ( current latest firmware of PX4 Autopiot used) : 2 main outputs to control :
uavcan.pub.udral.esc.0.id: 111
uavcan.pub.udral.readiness.0.id: 112
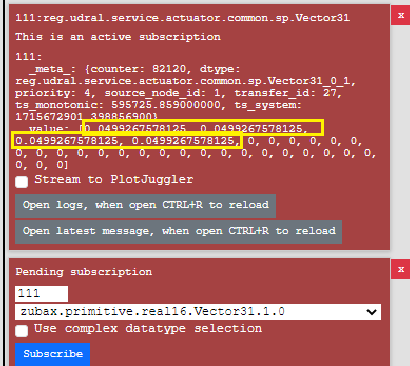
first 4 index of udral.esc.0 will give output to control for 4 ESCs (min:0 - max:1) below is sreenshot from Yukon:
- When i used ratiometric torque ( setpoint_rat_torque ) => but It can accelerate motors to the maximum velocity even at very low setpoint values.( from FMU output), it can take off and fly up vertically and i can not control its velocity to land.
uavcan.sub.setpoint_rat_torque.id: 111
uavcan.sub.readiness.id: 112
video flying with setpoint_rat_torque:
- When i used ratiometric voltage ( setpoint_rat_voltage) => with this mode, i can control the velocity by Throttle Sitck (throttle stick increased => velocity increased and vice versa) from Remote Control (Flysky i6s) but it makes a grinding sounds when rotors ramping And Velocity ouputs are not asynchronous => UAV can lift up a little bit and fall down.
uavcan.sub.setpoint_rat_voltage.id: 111
uavcan.sub.readiness.id: 112
mns.ratiometric_to_absolute_mul: 20 # battery: 20V
- When i used velocity control mode =>
setpoint_velocitynot working,setpoint_rat_velocity_u9can work but not like what i expected ( Rotos ramping did not follow Throttle Sitck, and still grinding sounds )
uavcan.sub.setpoint_rat_velocity_u9.id: 111
uavcan.sub.readiness.id: 112
mns.ratiometric_to_absolute_mul: 5000
And for each mode above, i have tried to change also other parameters to make my UAV flying as what i expected but still can not!
I researched alot and it looks like : velocity control mode is high recommeded But what i tried is above result.
Please help.