Hi Zubax Team,
We’re planning to use the FluxGrip FG40 magnetic gripper on a RealMan collaborative arm through the end-effector interface . The Interface (page 59) provides:
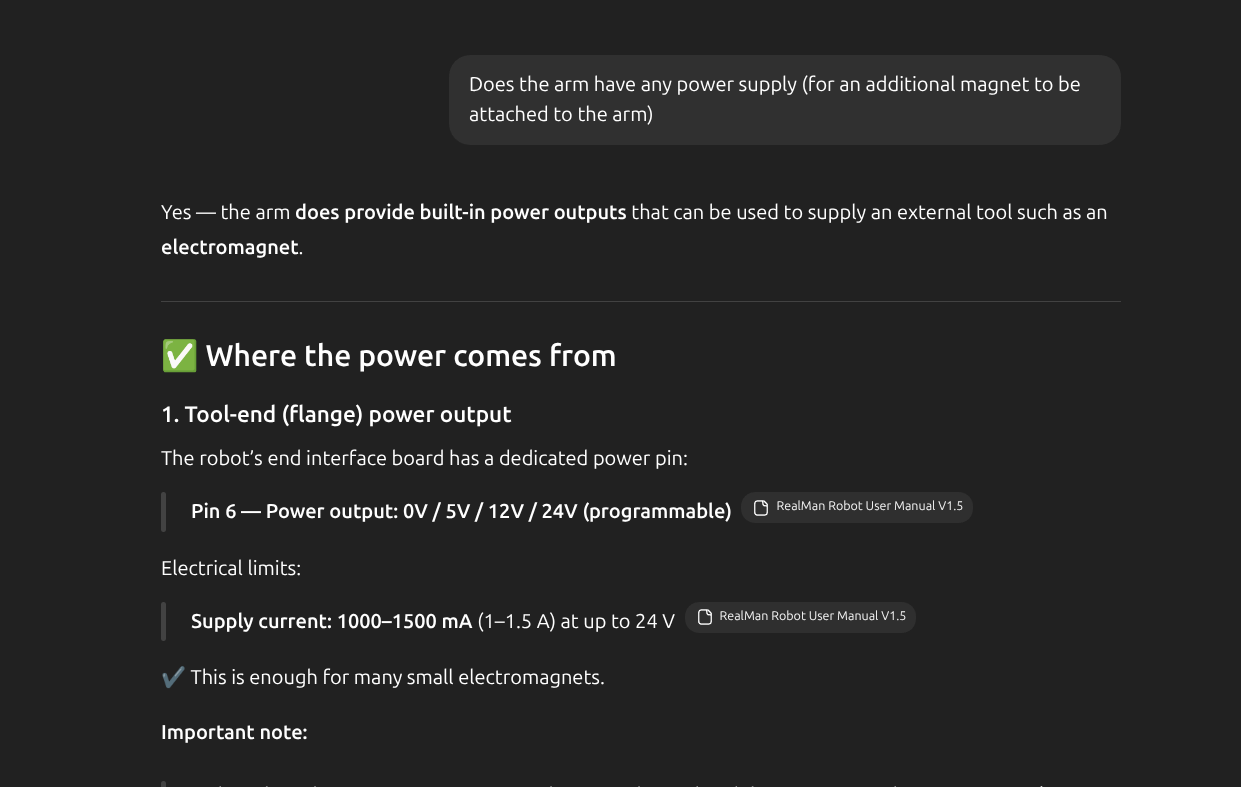
End flange power: 5V / 12V / 24V (up to ~1.5 A)
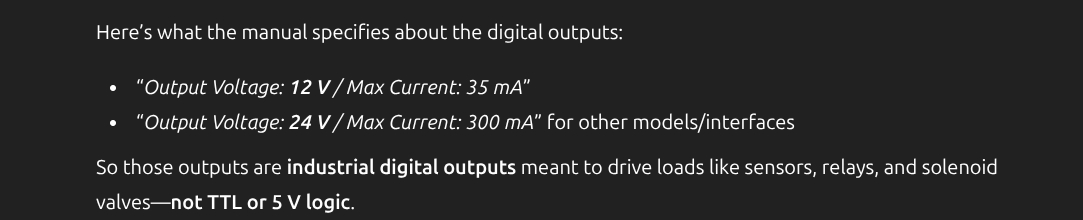
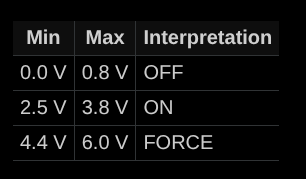
Two digital I/O channels
RS485 (Modbus RTU)
Has anyone integrated FG40 with similar cobots before?
What’s the recommended approach here; analog voltage control, RC PWM, or Cyphal/CAN? Any wiring tips or best practices to ensure reliable switching and feedback?
Thanks for any guidance or examples!
This method will provide you with more control/feedback, however the only way this will work if you make an additional converter piece of hardware that would go between the RS485 and CAN interface. If you want we can help with that for a fee.