We are using Myxa ESCs with Lumenier LU8 Lite 85kV motors and 20x13 propellers on a 12s system.
We were able to reach about 3200 RPM and 4.8lb of static thrust without field weakening, but need more thrust in order to hover.
With Field weakening on, we were able to reach an impressive 3850RPM with 6.9lb of thrust!! Without the propeller on, I was able to throttle up to just under 4000RPM before experiencing some motor desync.
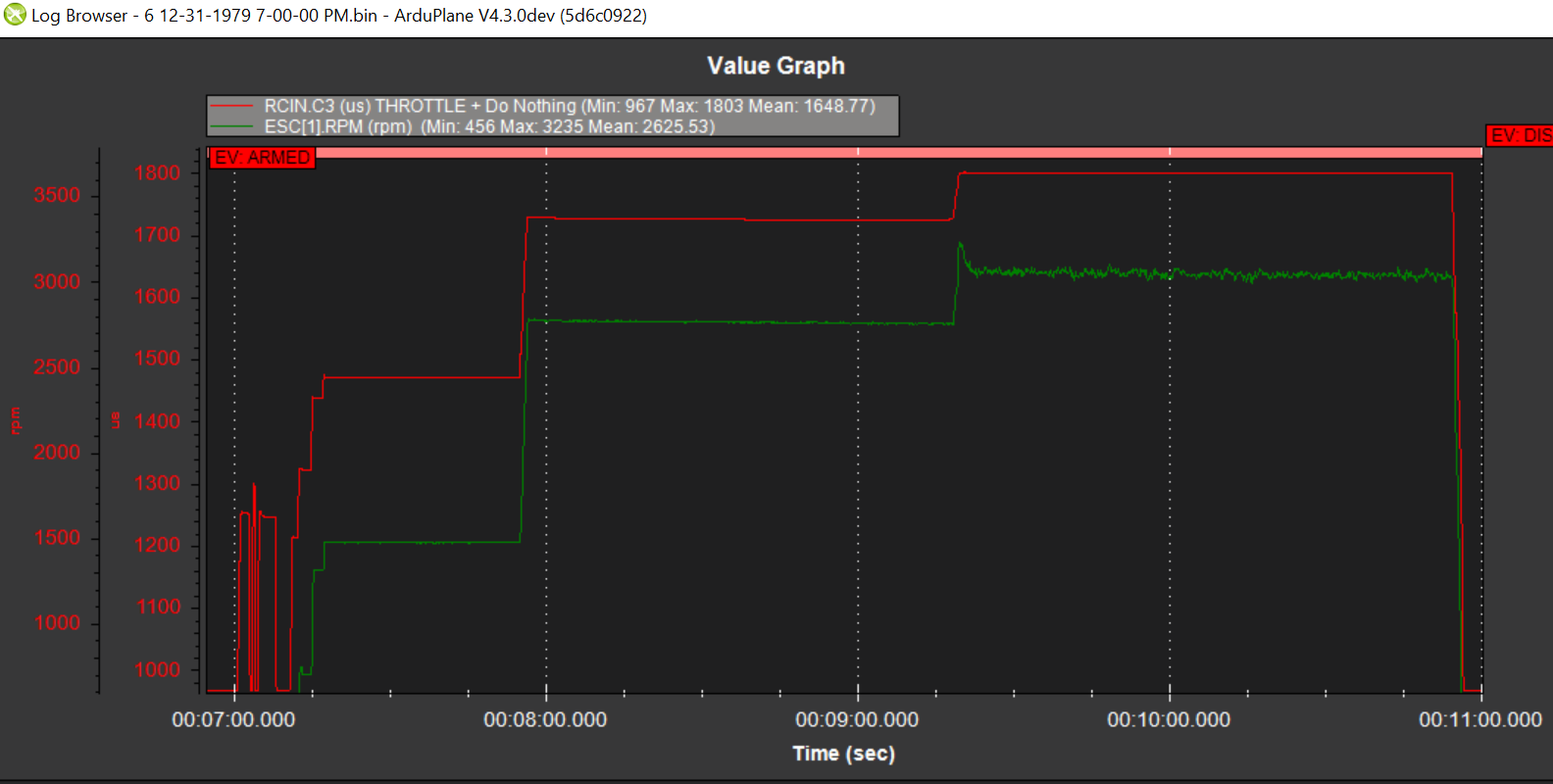
We are having trouble holding a setpoint in the field weakening regime however. Below is a screen recording of a test which displays some fluctuations in RPM.
Also, in RPM control mode, the ESC is unable to reach the set point in the field weakening regime and often freezes.
At lower RPMs outside of the field weakening regime, the control is spot on, but in field weakening, the control is much worse. We have been playing around with the m.fw_bemf_ctl_kp and m.fw_bemf_ctl_ki parameters, but have not seen much performance change. Could you provide some guidance on getting a locked in response? Thank you for your help.