I have 4 myxas on telega versions 0.3 and 0.4. Recently, I was trying to update their telega version to 1.0 but in the process I found an issue. Each Myxa can spin a motor when it’s the only myxa in the can line but the second you add another they both stop working. (I have double checked the node id is right). Also, when I tried connecting the babel to upgrade the firmware, I was simply told “too many errors” and then the babel promptly stopped working (led turned off) and UAV CAN GUI tool stopped responding. Do you guys have any idea what my problem could be?
Hi Jhonny,
Please share the configuration parameters of your Myxas and describe how they are powered to ensure there are no pathological ground loops.
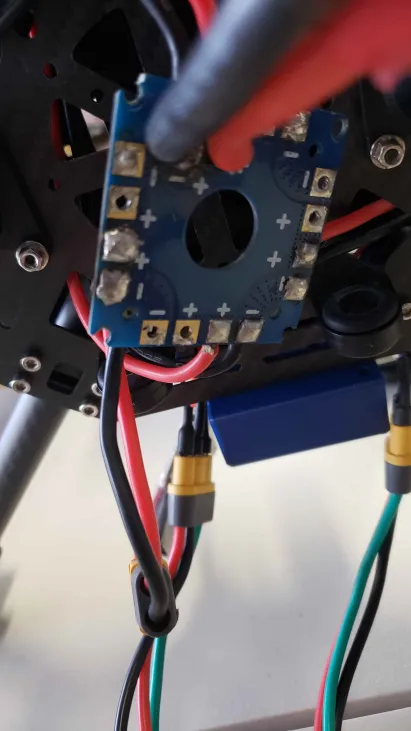
The params myxa have been reset to defaults aside from the ones needed to be changed for the specific motors. (I’ve uploaded the params of 2 myxas). They are powered by a PCB that is basically just 2 copper fills and some pads (not the prettiest but I think it gets the job done)
MyxaParams1.yml (2.0 KB)
MyxaParams0.yml (2.2 KB)