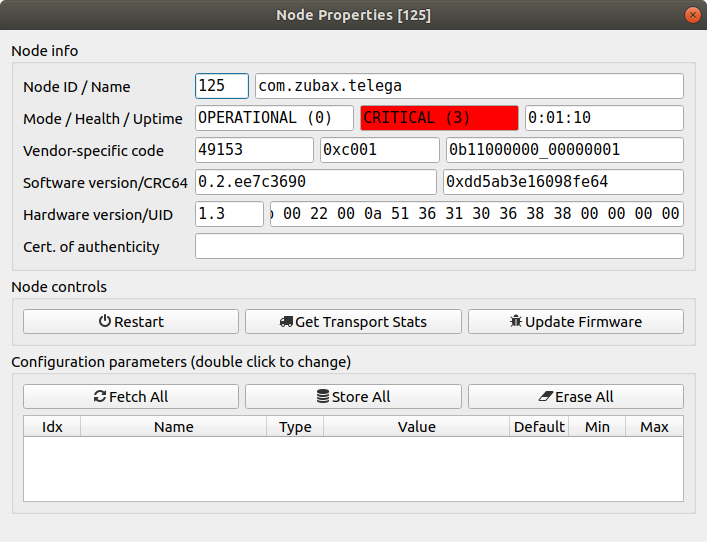
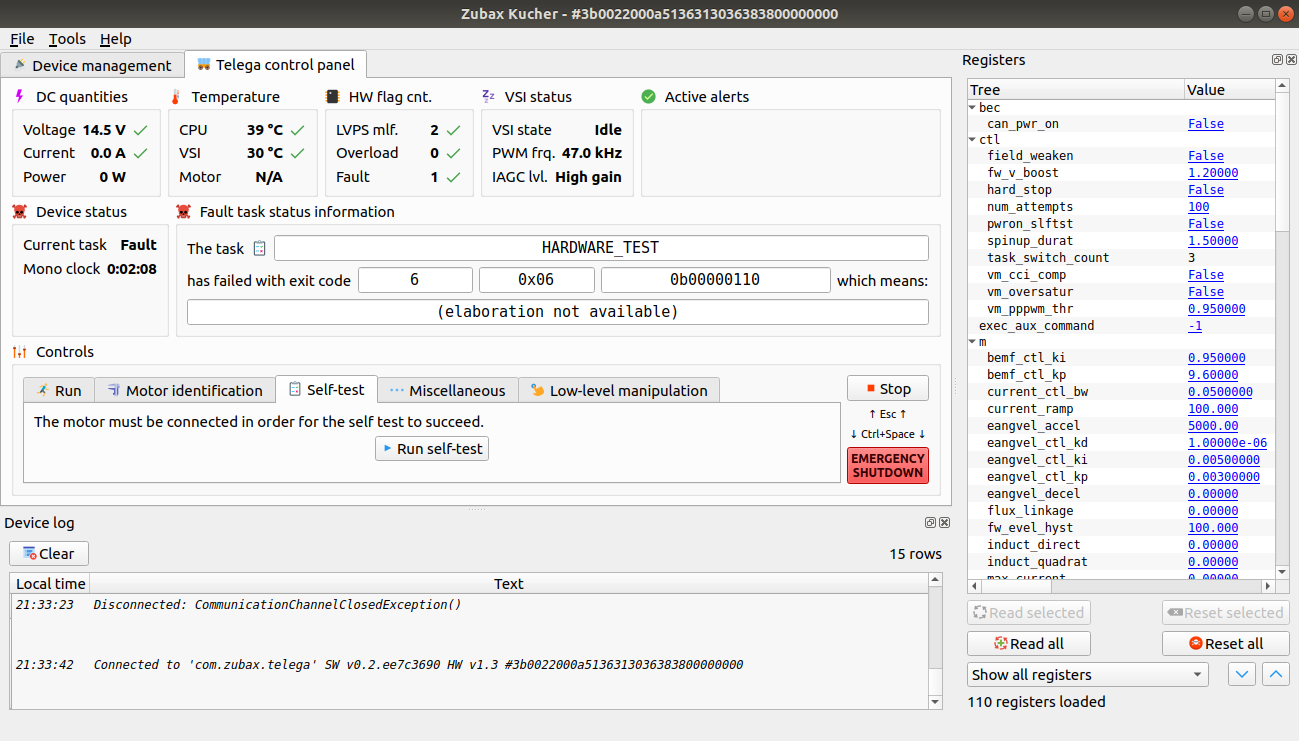
Upgraded my Mxya (correctly, I hope!), but seem to be getting some errors - I see red skull and cross bones on device status in Kucher (presumably not good) and a critical health status when access the Myxa from UAVCAN GUI Tool (also presumably not good); it also fails the self-test in Kucher.
I have even tried the correct power on sequence for v0.1 (although I understand this is fixed in 0.2), but still get the same…
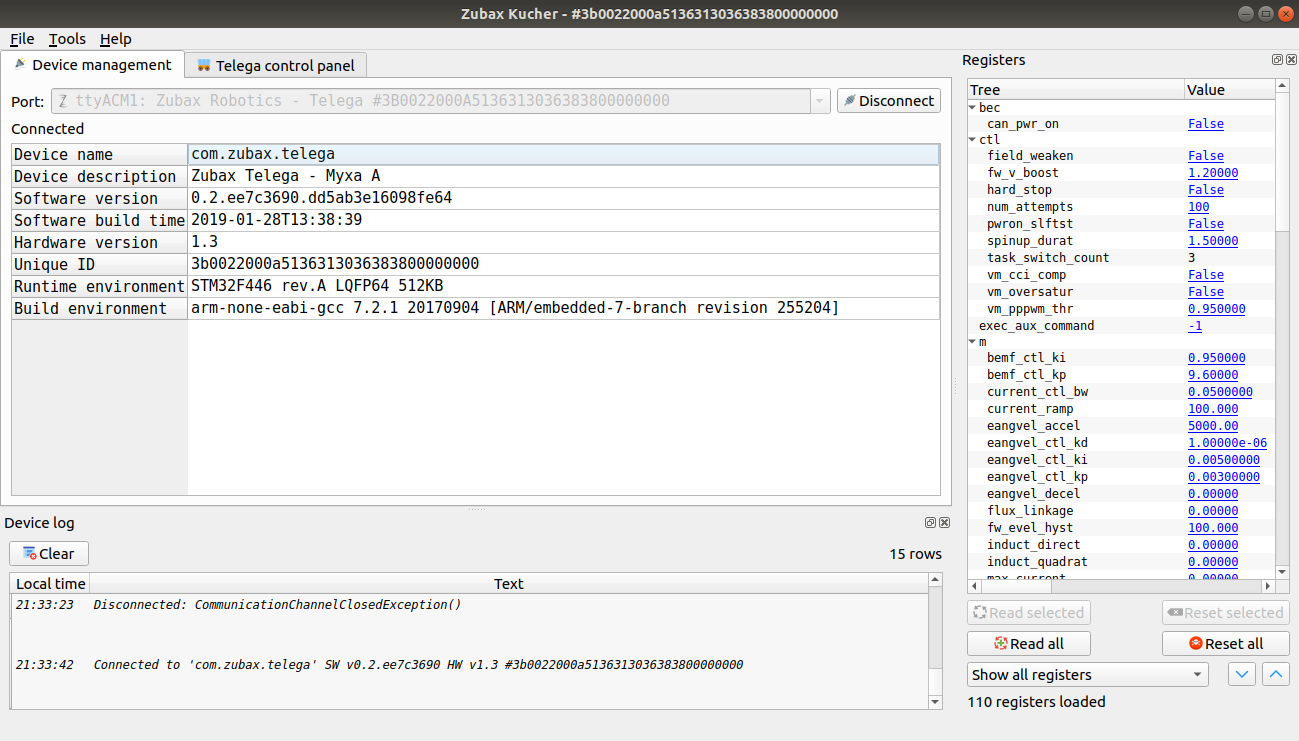
Perhaps someone can shed some light on the situation. Screen snaps are attached for reference.
Hi @david, the Kucher screenshot indicates that a self test was unsuccessful; perhaps the motor is not properly connected to the controller? When the self-test issue is resolved, you are expected to see the same FAULT state again, because after the firmware is updated, Myxa will forget its configuration parameters, and you will need to perform motor identification again, as explained in the quick start guide.
Thanks, @pavel-kirienko! Will check that I’ve got the motor connected correctly. Can you confirm if v0.2 incorporates support for higher resistance (ie. gimbal) motors?
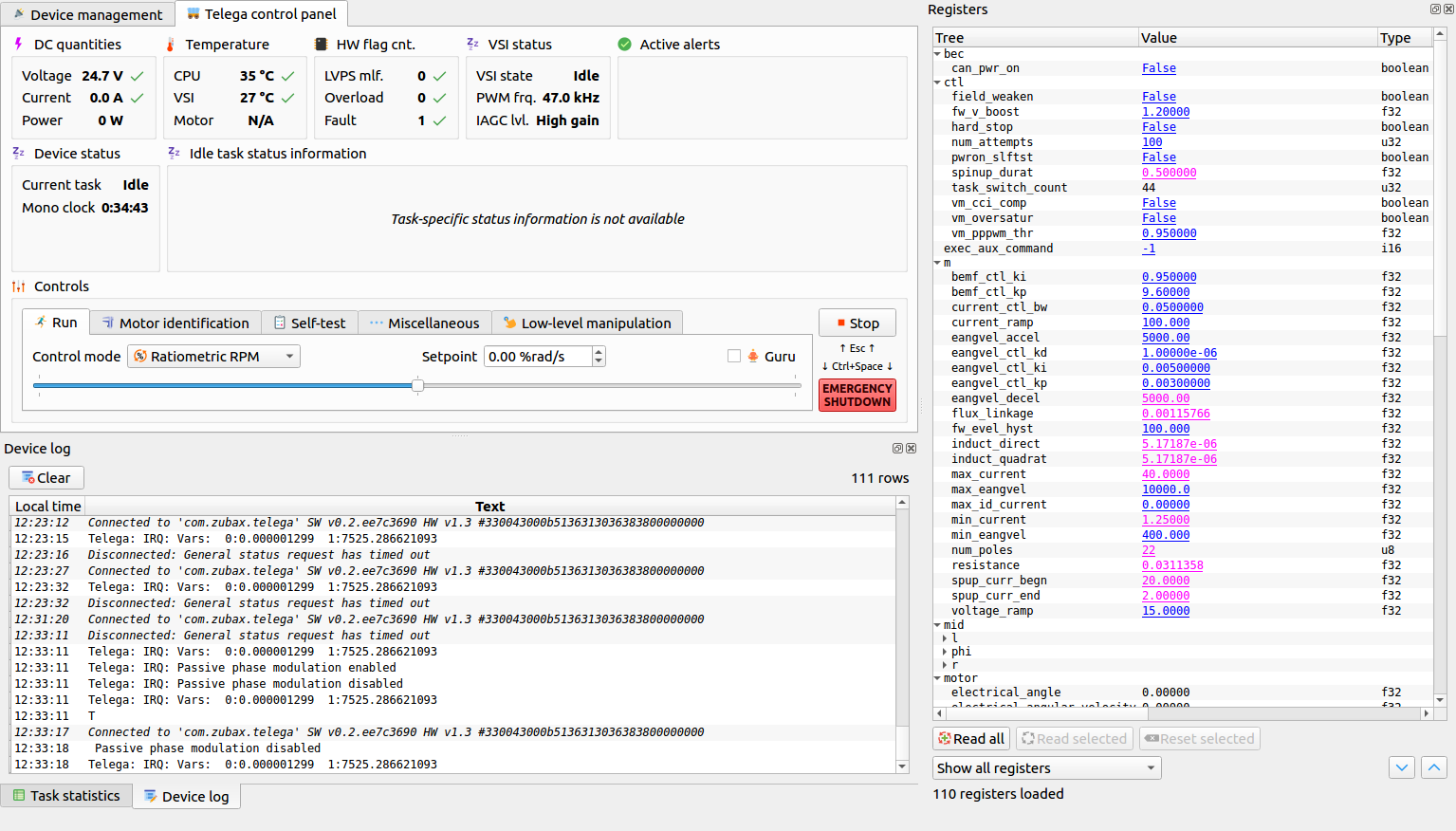
[Disconnects abruptly after a couple spinup pulses]
Note that I have adjusted the spinup duration and current to address issues, per the guide.
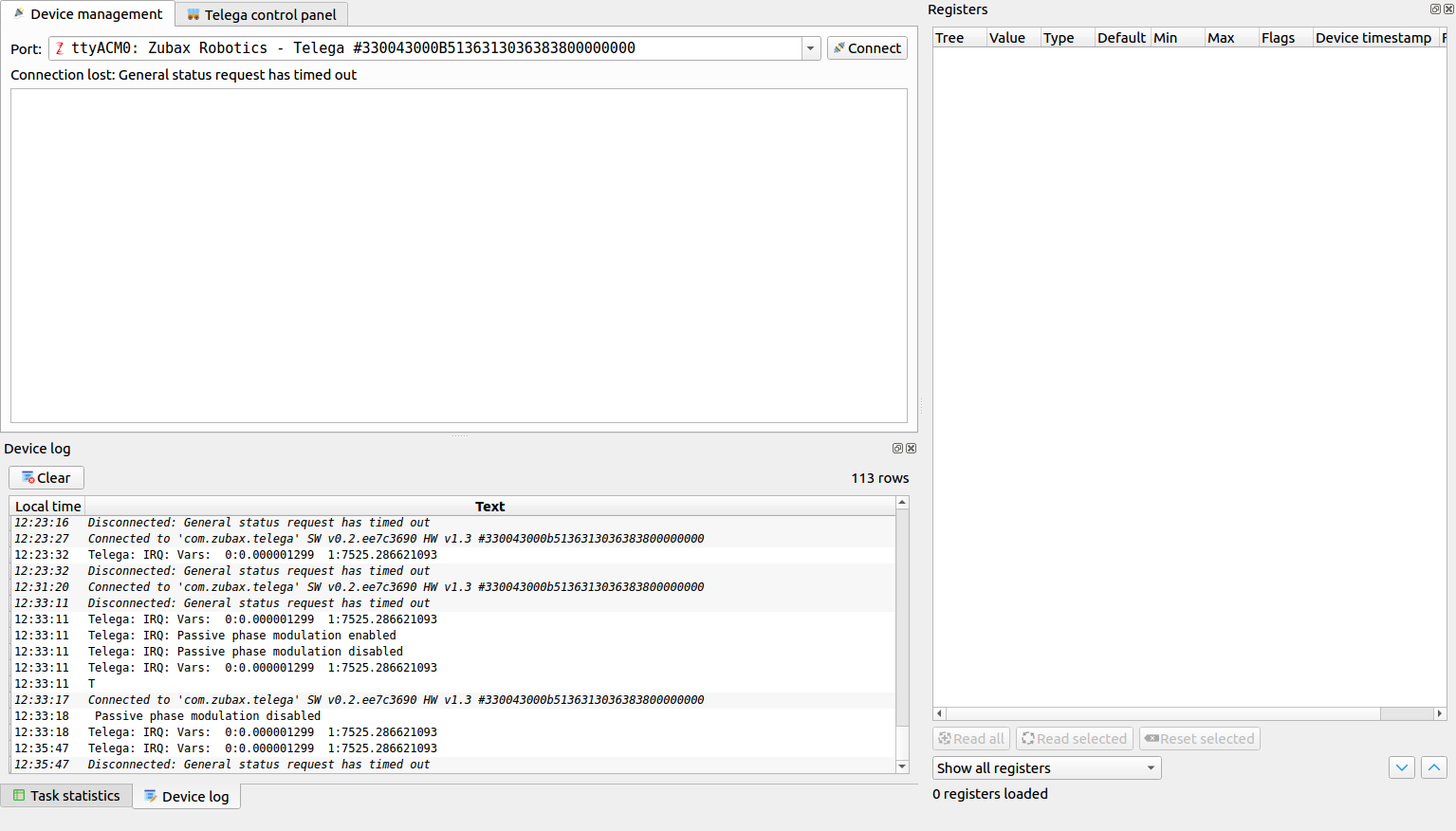
It would be one thing if it just gave up on spinning up the motor, but spontaneous disconnection with only “General status request timed out” leaves a lot to be desired. Running Self-test from Kucher results in a couple twitches, but no other communication.