I have already try but failed.
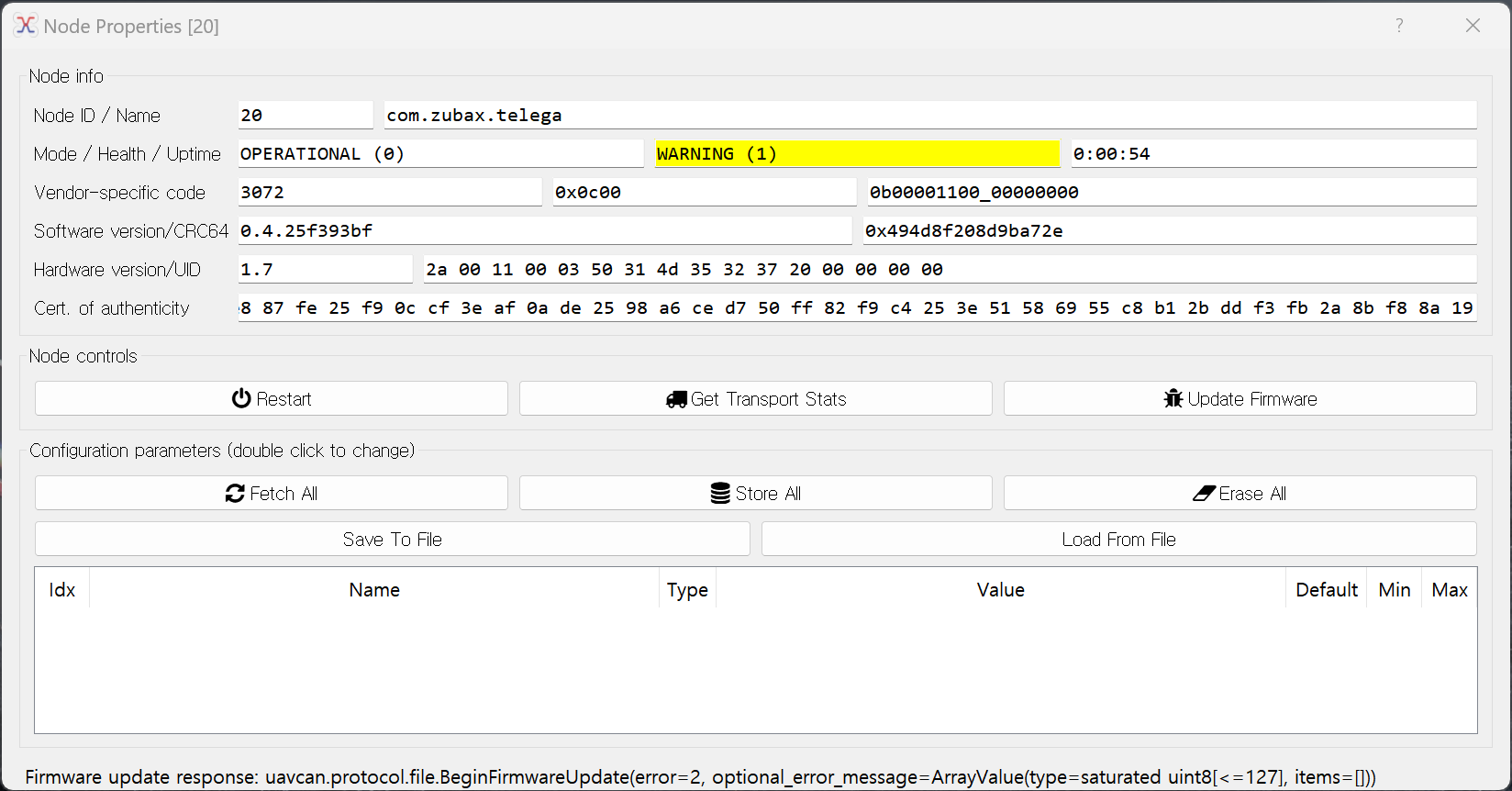
There is an error in the capture.
Thanks.
And I also have try to update using interactive console as you said #1 but failed.
I have already try but failed.
There is an error in the capture.
Thanks.
And I also have try to update using interactive console as you said #1 but failed.