Dear Zubax Team,
I hope this finds you well,
Thanks a lot for the support over here.
I have a question about initiating RPM Command using pyuavcan_v0 library. To my knowledge the only way to do it using node.periodic(0.1, setpoint1). I would like to send the throttle RPM command instantly using pyuavcan_v0 in the similar way that the serial doing it rpm 1000, because I noticed that the performance differs (Serial is better since it is not periodic). In the documentation of pyuavcan says node.periodic is for one-shot also…
I want to disable the periodic thing and just send the command.
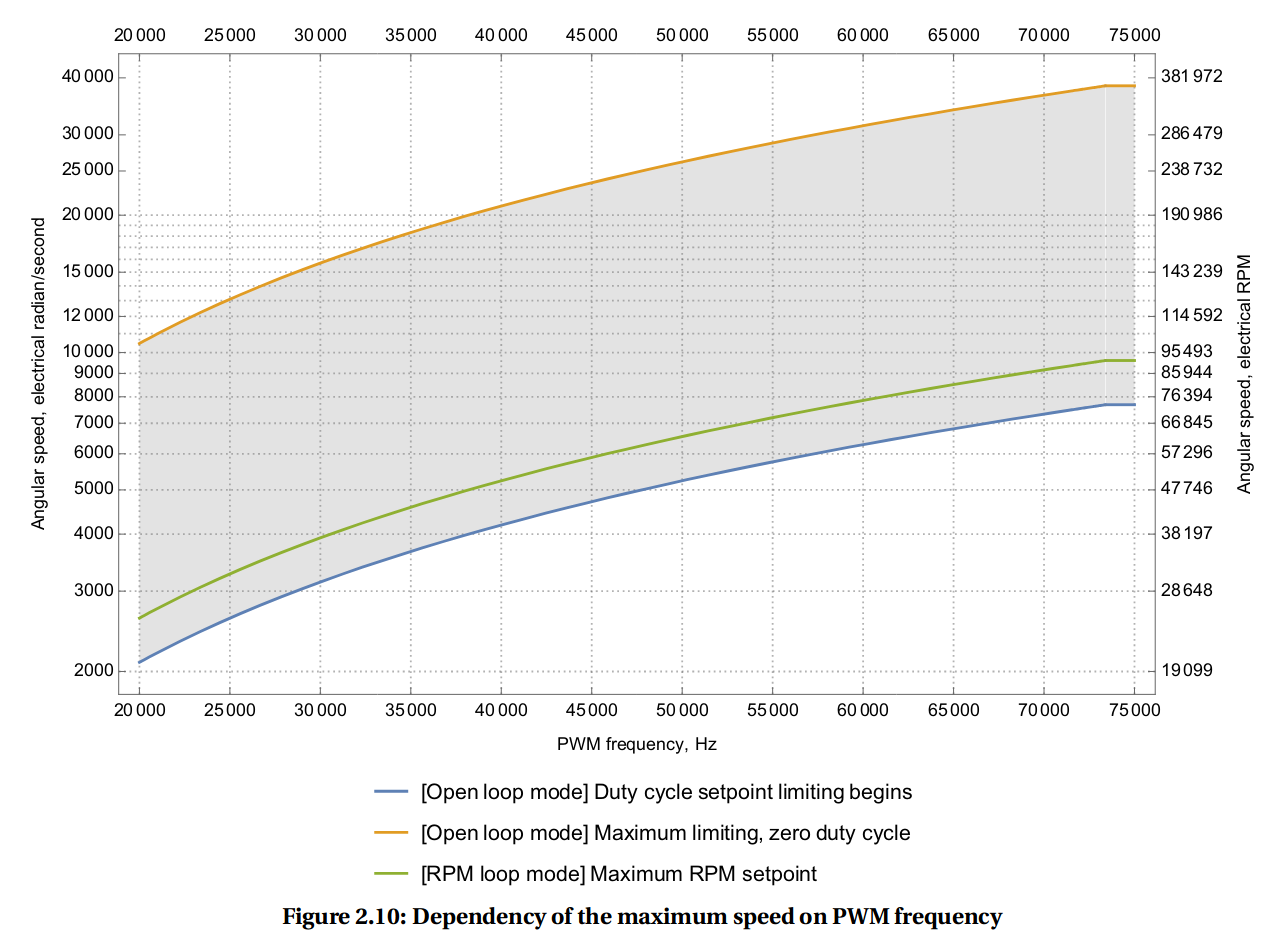
I am also having a max limit of 10700 Mechanical RPM using RPM governor mood. I would love to increase it, I tried increasing mot_pwm_hz to 75000 and this is the limit.
To publish a message once, just say node.broadcast(message). No need to use the periodic handler here. In your case it would be like node.broadcast(pyuavcan_v0.equipment.esc.RPMCommand(rpm=1000)).
Re max RPM, you may have reached the hard implementation limit as shown in the reference manual.
I used node.broadcast(message) and it worked perfectly, however it works only for 1 second and stops after that. How to specify the period in seconds.
I tried node.spin() but this only specify the period of feedback.