hi, problem with Mitochondrik LV, does not connect to Kucher via UART
This is probably because your Mitochondrik LV comes with Telega v1 like all newly shipped devices do by default. Please follow these instructions instead:
The difference between Telega v1 and v0 is outlined here: Telega v0 quick-start guide
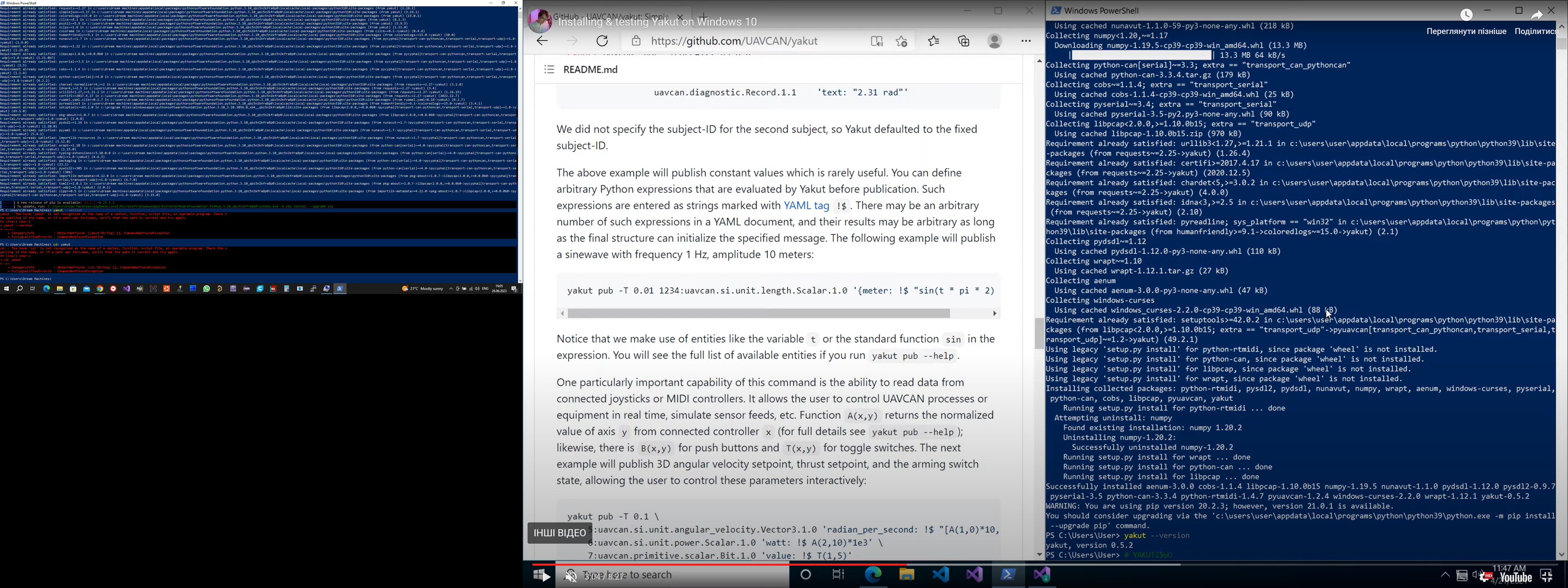
I saw this guide, YAKUT installs but doesn’t start
I need to have more information to be able to help.
Створити точковий рисунок.bmp (35.6 MB)
left side my PowerShell, right side your instruction
it may be easier to purchase a CAN-UART adapter to connect to the Kucher?
Ah, this is fairly common. The problem is that sometimes Python installations are broken out of the box on Windows and need to be fixed by exporting the path where executables are stored manually. Check this out:
You need to find where the yakut executable is installed and add that directory to your PATH environment variable.
Kucher is no longer recommended for new projects, so I would strongly advice against that. That said, you still need a USB-to-CAN adapter to interface with the device via the CAN bus.
ok thank you
hello, I connected the mitochondrik lv via CAN - USB, maybe I have problems with DSDL, I am attaching the Ykon screenshot
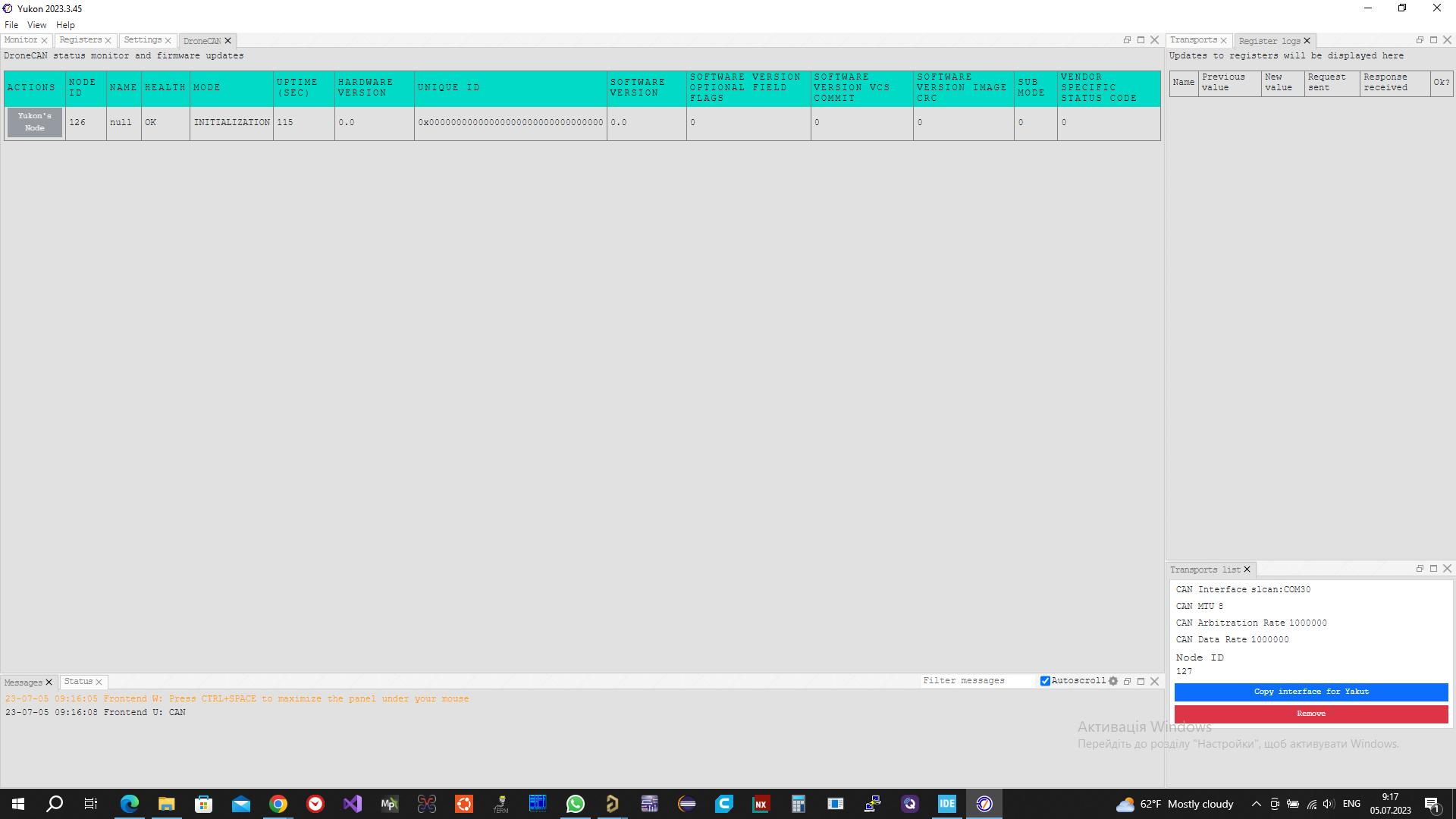
I presume the Mitochondriks you’re using are equipped with Telega v1.0 (that is the default option nowadays), which supports Cyphal/CAN rather than DroneCAN. If this is so, then you should not use the DroneCAN tab, as it only displays DroneCAN devices, and use the other tabs, mostly the one titled Monitor. Mitochondrik should appear online in the monitor tab shortly after powering on.
the problem is that nothing appears on the monitor tab
Please describe how Mitochondrik-LV is powered and connected to the CAN bus. Also, do you see any activity on the RGB LED and the CAN activity LEDs? Is there 5V available at the 5V_OUT pin?
5V available at the 5V_OUT pin
RGB LED and the CAN activity LED do not shine
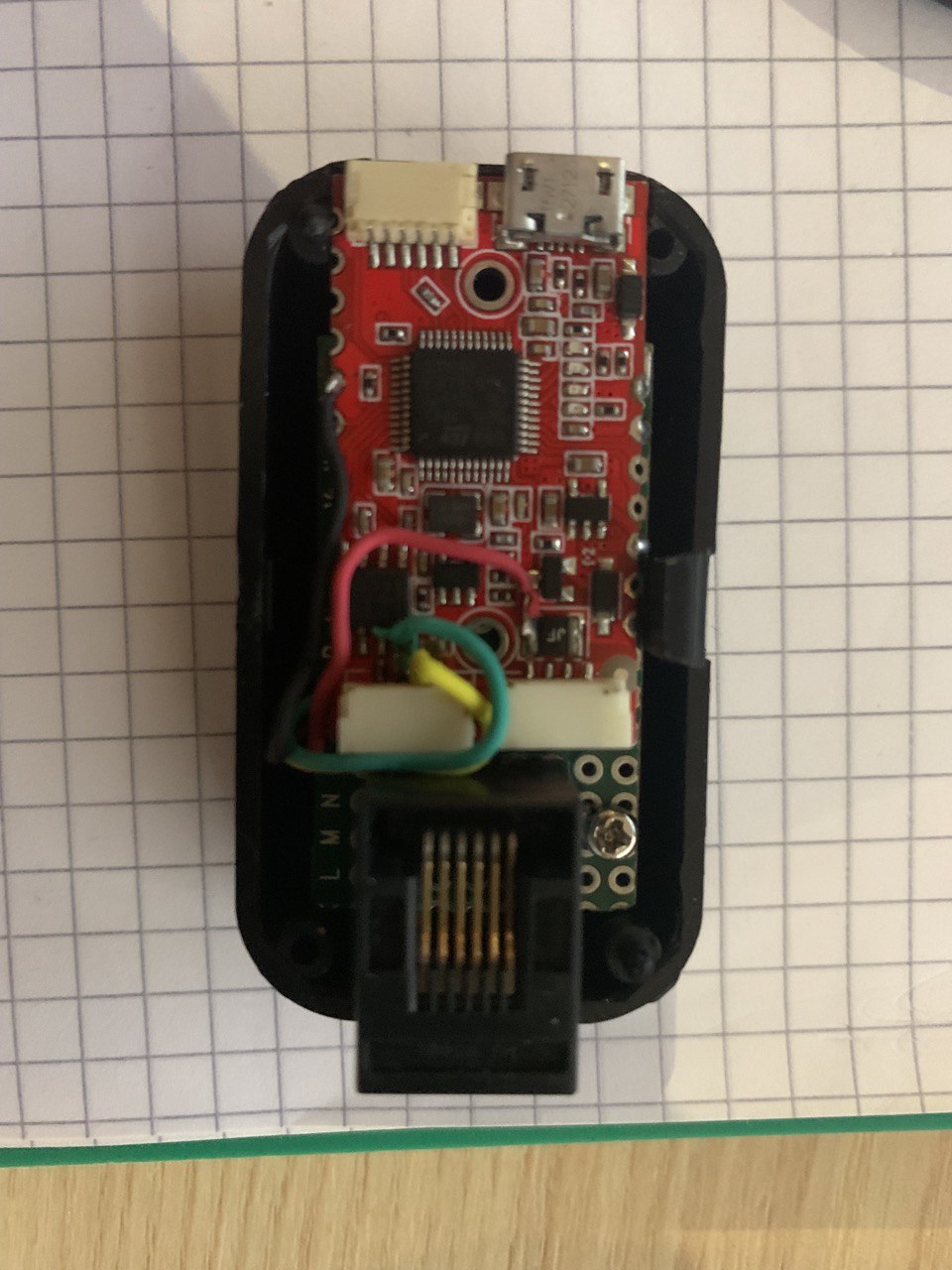
Please share the schematics.
RGB LED blink
CAN LED flashes 3 times
I connected it to the breadboard as in the datasheet
If you see the CAN LED blink and yet no node appears in the Monitor tab, this means that there is a physical connectivity problem or the CAN adapter does not support the SLCAN protocol properly. Please share the schematic and the model of the SLCAN adapter you’re using.
To be extra sure, I just reproduced your steps using Yukon on Windows and my Mitochondrik appeared online as expected. I was using Zubax Babel as the CAN adapter.
Please also describe the behavior of the RGB LED. It should be blinking red-yellow, rapidly alternating.
RGB flashes as you described. The adapter looks like Babel, I borrowed it from a friend and I see that he changed something for reasons unknown to me
{kind=link}
I will try to check if it really works