On a bench test setup with six Myxa B0Z controllers (T-Motor U8II KV 150 motors, T-Motor FA28.2x9.2 folding propellers), we observed that some motors track their setpoint poorly at high velocities.
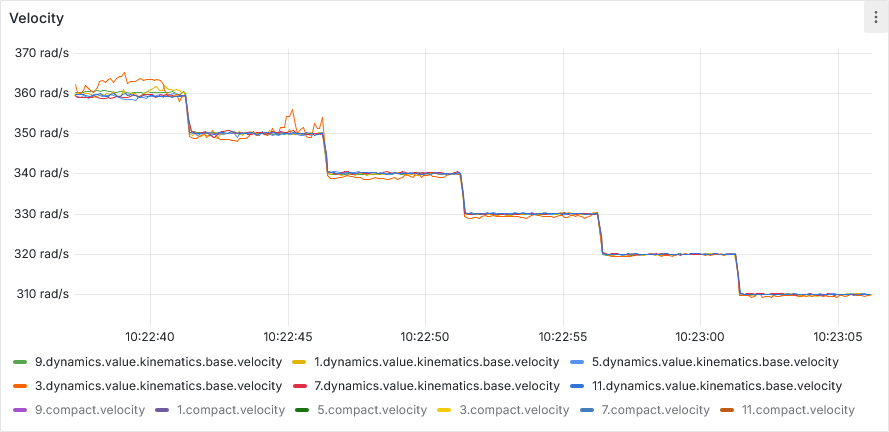
In the test shown below, all six drives were given velocity setpoints in steps (for five seconds each 360, 350, 340, down to 310 rad/s). Some drives (Node IDs 5 and 11) manage to operate precisely at each velocity, while other drives (Node ID 3 in particular) show significant tracking errors at higher velocities.
Today we repeated the test, but swapped motors 3 and 11. The drive with node ID 3 thus now drives the motor that was previously connected to the drive with node ID 11, and vice versa.
The problem persists, it is still drive number 3 which tracks poorly. This leads to the assumption that the issue is controller-based, not motor-based.
Do you use shared motor model parameters (resistance etc) for all controllers or do you run motor identification on each of them individually? Did you re-run identification after swapping the motors? If yes, how do the values compare to each other?
Motor identification was ran on each controller individually, and the parameters were swapped (yakut dump, load and reboot) when swapping the motors. Parameters are fairly similar for all six motors; I will upload a dump when I’m back in the lab later today.
Thank you for the parameters. May I ask you to swap all three phase connections on the ESC that is showing issues (e.g., change ABC to BCA or CAB so that the direction of rotation is not altered) and repeat the test? Alternatively, change any two phases and enable vsi.swap_ab. There is a rather exotic issue that I want to rule out.