So I finally got to rebuild my large drone.
I have connected the Zubax GNSS GPS with GPS type is GNSS but still no gps message.
I confirmed that the buss is connected correctly and there is a terminating resistor in the second can port on the gps.
I have to check the LEDs, will check tomorrow when I get back home but wondering what else I need to check.
Oh and the Arducopter firmware is the latest .3.6.12
Any suggestions would be appreciated as I am pretty sure I am missing a config item.
Well I checked the continuity on the connections and checked that they are connected in the right order.
All good.
I have check all the settings I can find related to UAVCAN and it all appears to be set right.
I have no idea what to do to make it work. FRankly I have never had this GPS work on my pixracer.
So I have no clue what to check.
I see the LEDs are blinking …green one and two red ones…all are blinking so something is up.
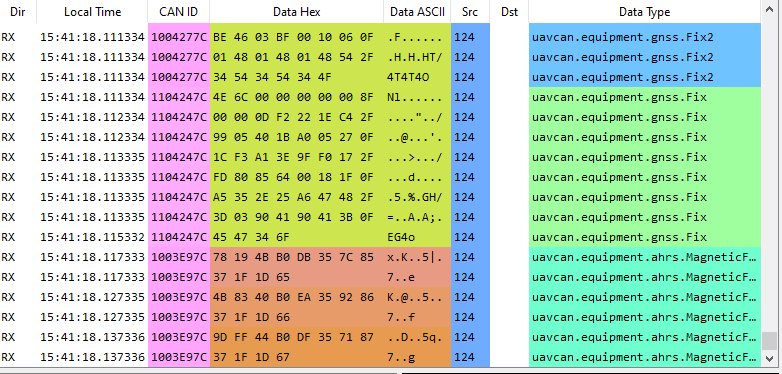
Found my Can adapter and the Gui…it says it’s in an error state…oh joy
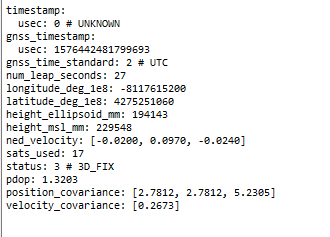
This tells me its getting a fix
So the GPS appears to be working.
And it states it has a 3d fix
So what am I missing.
Tried a different Flight controller today. Same result.
Tried it on a different GPS Can port…no change.
I have no clue whats wrong.
I can see there are three LED blinking. The PPS is about once a second.
The status is about once a second and the can port is green flashing a little less often.
Well this is odd.
I wrote an updated uavcan.node_id to the gps.
Then I plugged it back into the drone and bingo works great.
What the heck.
I can only assume that the writing of the new node id reset something in the gps. I have no idea but now I get a 3d fix in my basement…wa hoooooo
Apparently this is caused by the autopilot. Please report this issue to the ArduPilot team. Changing the node-ID has no implicit effects on the behavior of the GNSS module.
Hey PAvel Merry Christmas to you and yours.
I agree made no sense to me to set the node id and suddenly it works. However I think the documentation for the Arducopter firmware is wrong.
If you read the documentation it states
CAN_DX_UC_NODE - which is the node ID of the autopilot
However for me to make it work I set the node ID to that of the GPS and I did that because it says in Mission planner to set the UAVCAN node…I assume thats the id for the gps or other such UAVCAN device. Anyway, it works great now. I get a 3d fix in my basement. Thats never happened before.
I do find it odd that I set the id from 125 to 42 and it all started working.
But hey its all good now.
Going to order another GNSS v2 for the second drone now.
cheers