One recurring question concerning the use of FluxGrip in a vehicle is whether its operation is likely to cause interference with compass-based navigation systems. The short answer is that such interference is negligible, provided that the magnet is placed adequately; a longer answer is provided below.
There are three possible cases of interest: when the magnet is turned on with the payload attached, turned on without payload, and turned off. Refer to the illustration:



When the magnet is off, there is no magnetic flux and hence no risk of significant interference even if the compass is placed directly against the magnet.
When the magnet is turned on with the payload attached, the magnetic flux is closed through the payload, and there is virtually zero leakage outside of the magnetic circuit formed by the magnet and the payload.
The most interesting case is when the magnet is turned on without a payload attached, which is an unusual configuration. In this case, the flux between the magnetic poles is closed through the air, with the majority of it following the shortest path between the adjacent poles, and the dissipation is minor. In an aerial vehicle where the magnet is used as a hardpoint for payload attachment, its working surface is normally facing down, away from the compass that is often elevated, which makes its contribution to the field around the compass insignificant.
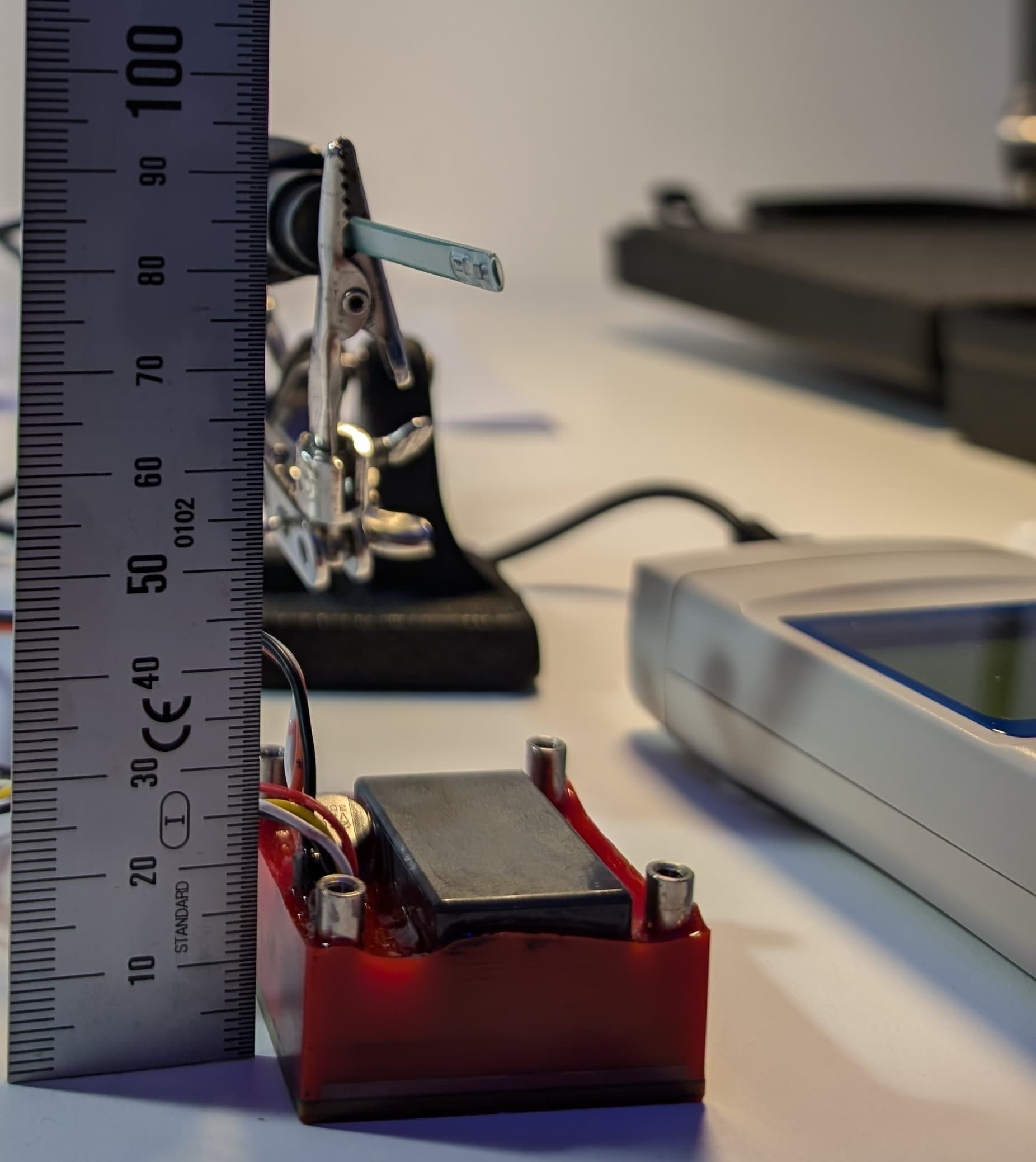
It is easy to ascertain this by turning on a FluxGrip without the payload attached and placing a teslameter (alternatively, one could use a Zubax GNSS or an ordinary cellphone with the compass app open) above it. It is immediately seen that unless the measuring device is placed directly against the working surface of the magnet (where the payload should be), the interference is virtually nonexistent.
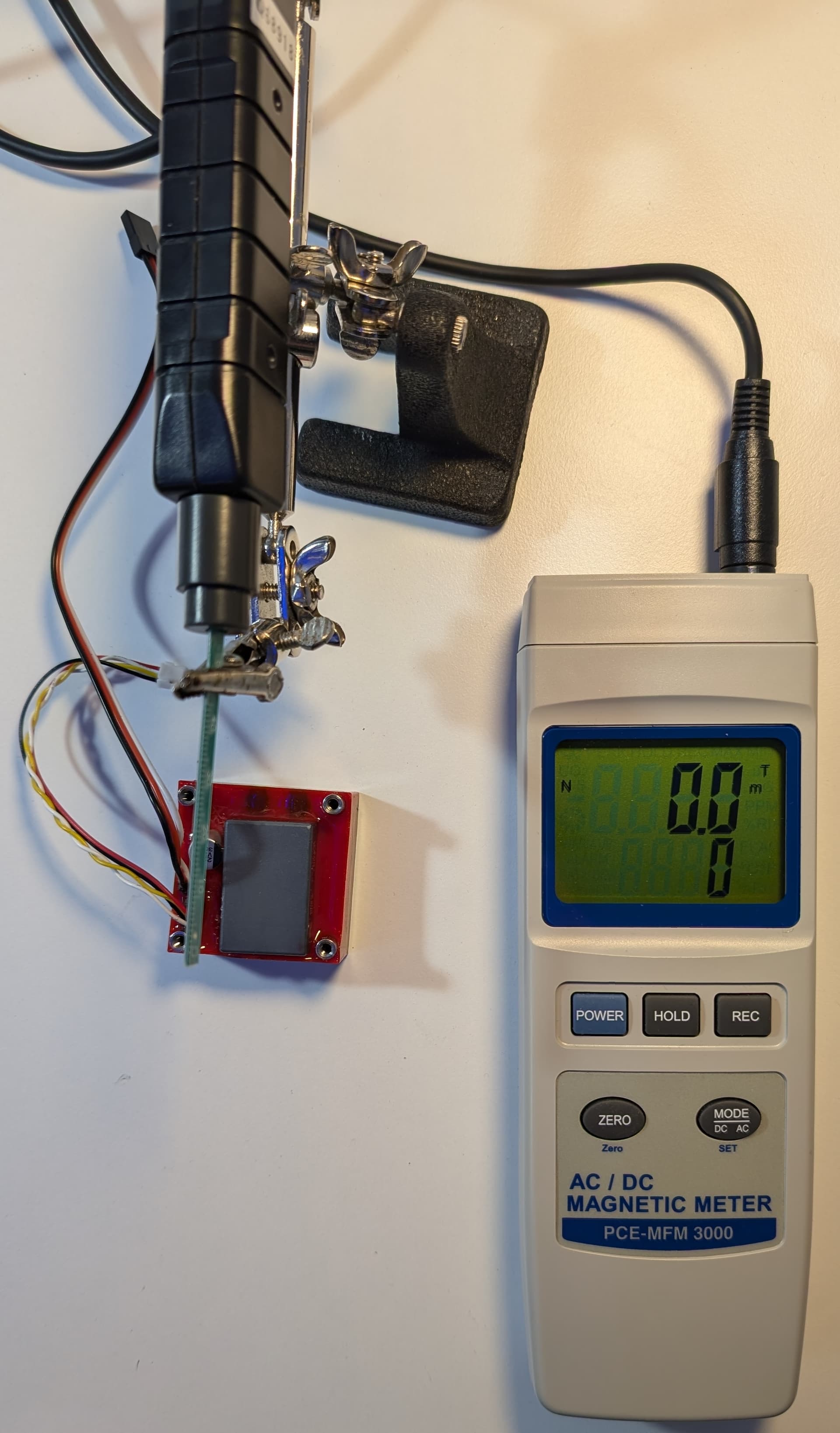
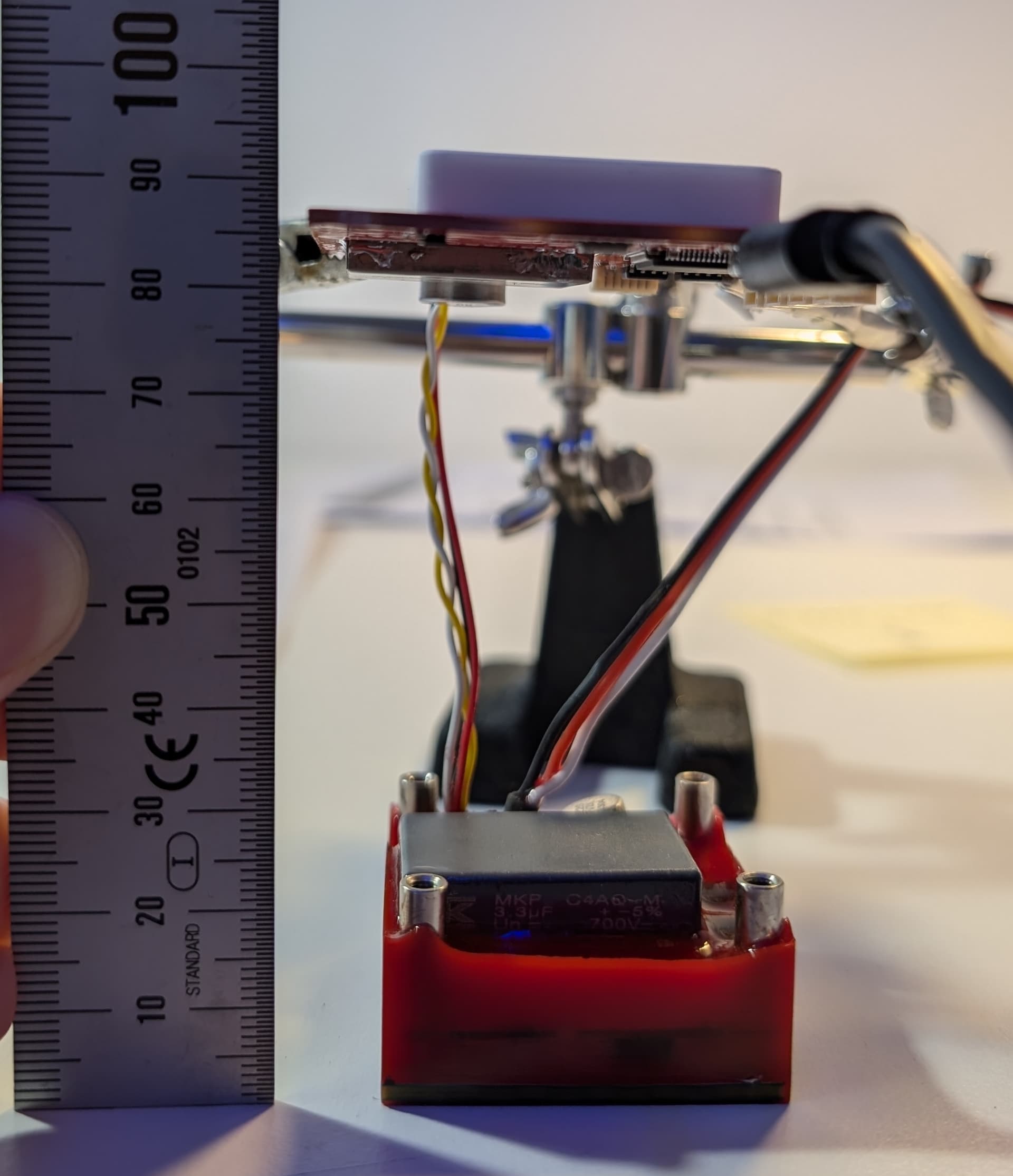
In the following test, we place the measuring head of the PCE-MFM 3000 magnetic field sensor 80 mm above the working surface of the magnet, or about 60 mm above the nearest surface of the device, such that the sensor axis is horizontal. The instrument is configured in the high-sensitivity mode with the resolution of 10 uT. The bias of the instrument is zeroed after placing the sensor head in the holder without the magnet underneath; afterward, the magnetized (turned on) magnet is introduced and slowly rotated about its vertical axis. The instrument reading stays at zero.
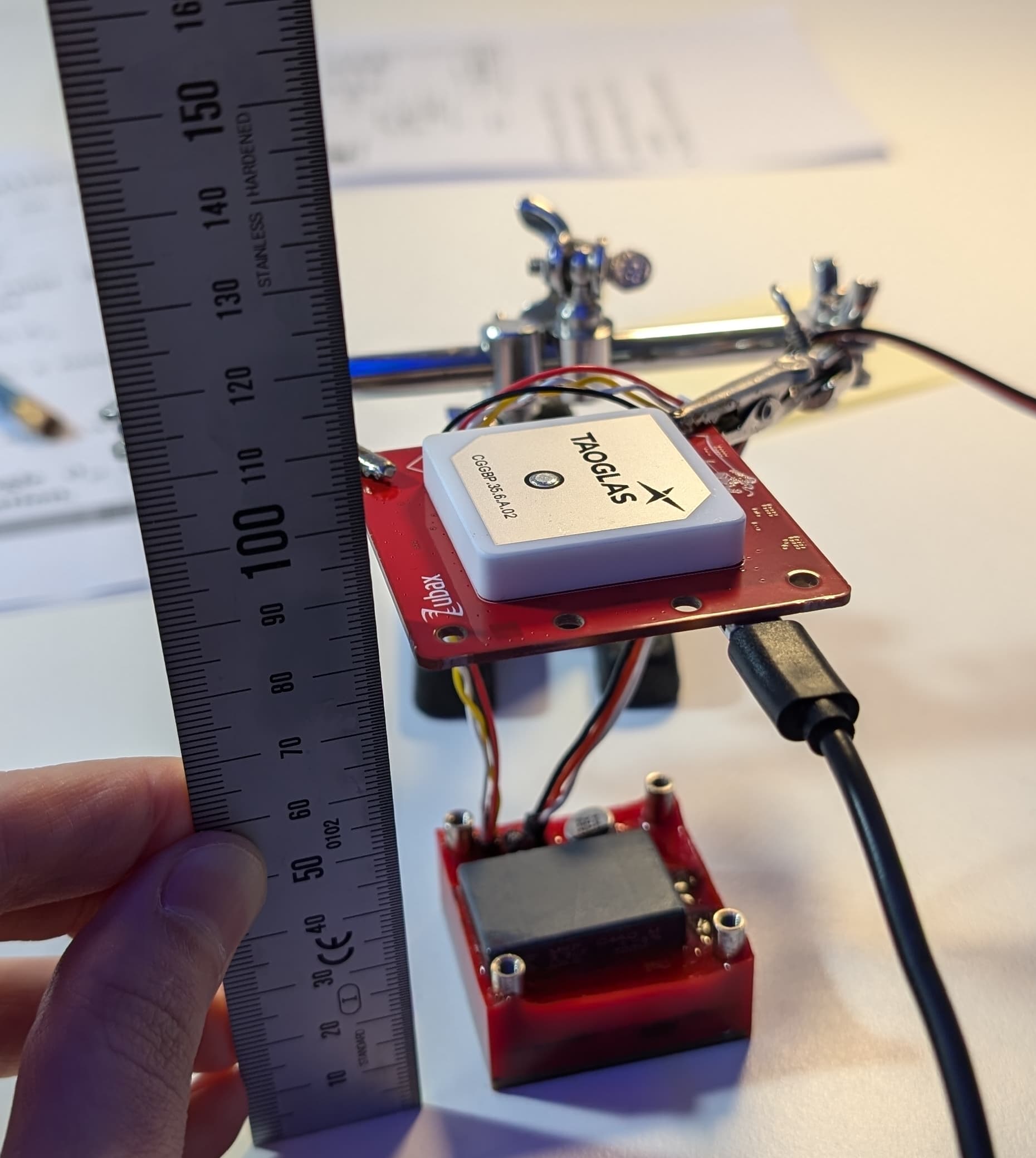
An attentive reader will point out that the resolution of 10 uT is low, considering that the magnitude of the Earth’s magnetic field near the surface varies between 25 and 65 uT only. The test is hence repeated using an actual high-sensitivity navigation compass used in an ordinary Zubax GNSS 2. In the new test, the sensor is elevated 85 mm above the working surface of the magnetized magnet, or about 65 mm above the nearest surface of the device. The measurements are captured twice using the $PZUBAX,MAG-FLD-XYZ NMEA sentence without the magnet underneath and with the turned-on magnet introduced at various orientations about its vertical axis.
The reading, in gauss, performed without the magnet is as follows:
$PZUBAX,MAG-FLD-XYZ,0.448,0.566,0.189,G,,*12
The same after the introduction of the magnetized magnet underneath the sensor is as follows:
$PZUBAX,MAG-FLD-XYZ,0.439,0.568,0.189,G,,*1A
The measurement does not appear to correlate with the orientation of the magnet.
Summary:
| Field strength, G | X | Y | Z | magnitude |
|---|---|---|---|---|
| Without magnet | 0.448 | 0.566 | 0.189 | 742 mG |
| With magnet | 0.439 | 0.568 | 0.189 | 742 mG |
Remember that 1 gauss = 10^{-4} tesla = 100 microtesla.
The above tests were performed with the magnet in a steady state. The actual (de)magnetization event lasts for approximately 20 microseconds; a pulse of this duration is unlikely to cause performance degradation of conventional navigation equipment.
The conclusion is that FluxGrip is exceedingly unlikely to cause interference with compass-based navigation equipment in practical scenarios, even in the worst-case scenario where the magnet is kept on without the payload attached.