Hi @pavel-kirienko and everyone!
We’re using 6 Myxas on a hexacopter that is driven by a novel propulsion system.
This propulsion system forces our motors to work at a relatively low RPM (500->1500) and high torques (these are within the motors’ limits)
During flight testing, we have been experiencing situations where the vehicle becomes unstable.
This only happens when the motors operate at the lower end of the RPM scale and are followed by an gradual increase in ESCs error count.
My suspicion is that these are points where the ESCs control loop becomes unstable.
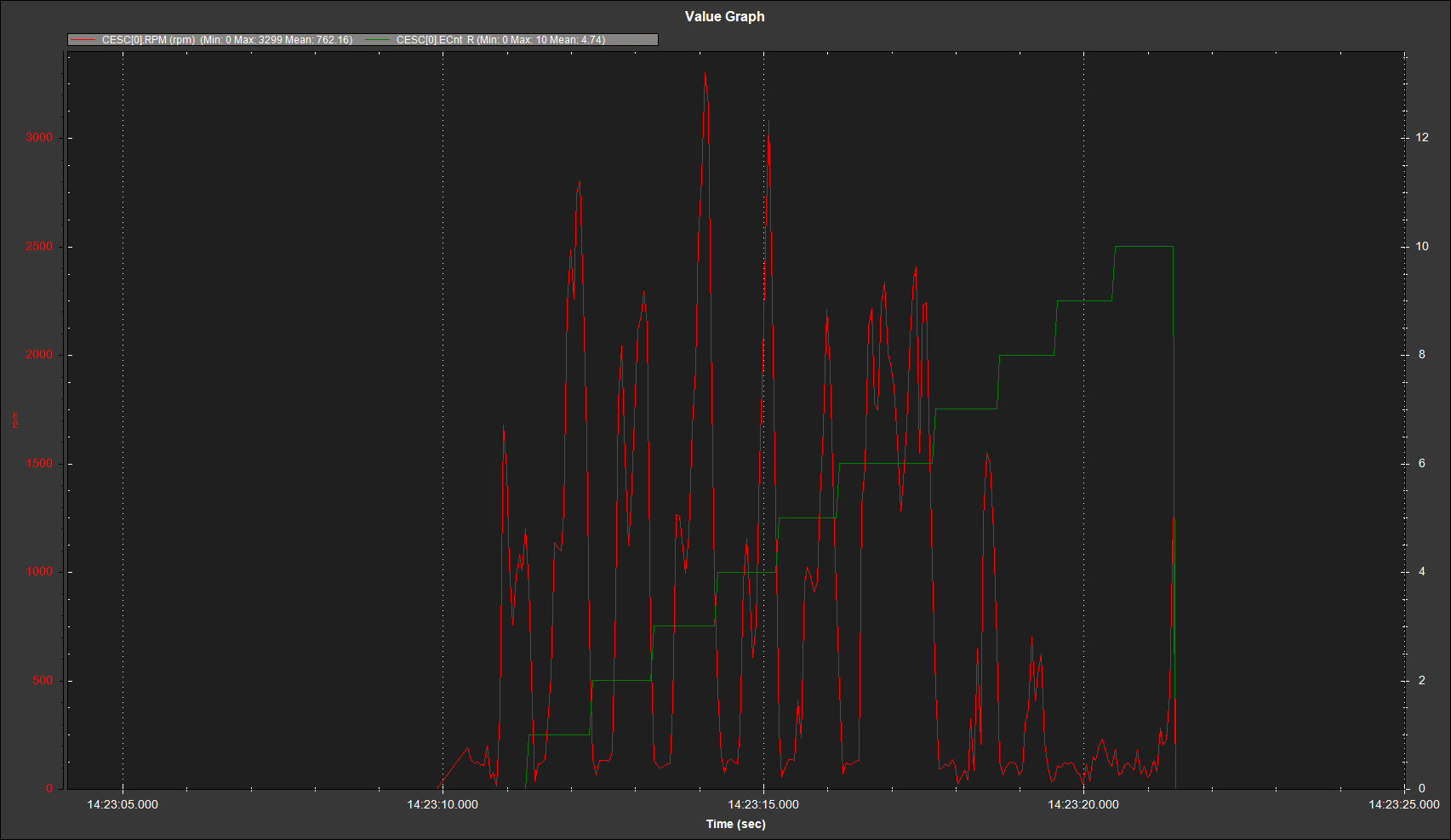
In the following graph you can see how every time the command is at a low point - the ESC error increases:
We are working in Voltage mode.
Should this phenomena be fixable by tuning the Myxa parameters?
Is there a systemic procedure to tune these? Or any recommendations of where to start?
Considering the work regime - should I opt for RPM control?
These are the parameters we work with:
Myxa4 before replacement 6-4-22.yml (2.1 KB)
Driven motors are Tmotor MN501 KV300
Myxa version is 0.3
Thanks!
Gad