Setup: 12n14p motor 470kv, 22.2V regulated power supply (im running at 22.2V so I know that I can reach the desired max RPM with a discharged pack voltage)
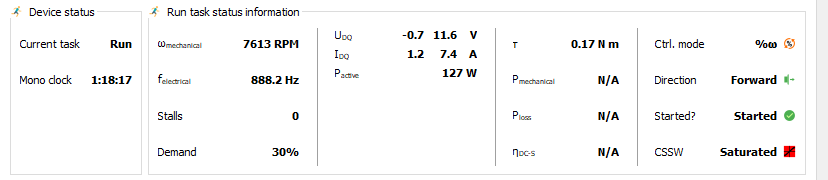
I’m getting a max RPM of about 7600 with the max_eangvel set to 20000 in control mode 2. The motor is 12n14p 470kv and is set correctly to 14 in the software. I attached a picture that captures the software state as well as the max rpm performance figures. Based one the kv selection equation, a motor of about 360kv should suffice; however, the controller saturates at only 7600rpm. Any advice?
Hi Geoffrey. This post can help you.
I read this yesterday before posting, but it doesn’t answer my question yet. It looks like my U_DQ is 11.6, which would correspond with a voltage utilization factor of 0.52? Is this due to the fact that I am running older firmware? If I upgrade to 0.3 will the utilization factor go up? This is all a bit confusing since I used the myxa manual to properly select the motor kv and gave myself plenty of headroom (or so I thought).
Hi Geoffrey. Sorry, I didn’t notice that you have old firmware. In the firmware was fixed the motor speed saturation issue at 80-90% setpoint value in the ratiometric voltage control mode. You can find release notes in that post. You can download the v0.3 released firmware here. So, the max speed of your motor running with the v0.3 firmware should be 9494 rpm.
Good to hear. That RPM would give me plenty of overhead. As for the FW upgrade, it seems as if I can only do this VIA a uavcan tool such as the babel; however, I have reached out multiple times to titan elite via phone and email and haven’t heard anything back. Can you point me to where I can purchase a babel or potentially link me to a uavcan tool that would be suitable?
Hi Geoffrey. You can order Babel here and update the firmware by means of the UAVCAN GUI Tool.