Hi,
I’m suing the Myxa to drive a motor, but the 20-47 kHz PWM frequency’s harmonics are interfering with a specilized ultrasonic acoustic sensor in our system. Is there a way to lower the PWM frequency to something really low, or turn it off altogether and drive with a square wave? We don’t need high RPMs.
1 Like
It sounds like you’re using Telega v0. If you upgraded to Telega v1, you would be able to increase the switching frequency to about ~60 kHz, or even higher, as described here: Voltage source inverter (VSI) interface - Telega v1.0 Reference Manual. The frequency can be reduced but then you should expect stability issues at higher speeds. In Telega v1 this is done via vsi.tick_freq; in v0 there’s vsi.pwm_freq.
It is not possible to disable PWM.
Thanks for the info. Would I break something for sure if I added capacitors between the leads of the motor to try and filter out the harmonics?
Capacitors are usually used in brushed DC motors. You could try but YMMV. If you do try, please report on the results. Thanks!
Thanks Pavel. We limit our RPM to 2200, any chance we could get away with a lower PWM frequency and hack the firmware?
Depends on the pole count of your motor. Actually if you shared your full config that would help.
Hi Pavel,
This is a marine application and we are using the Blue Robotics T200 motor (https://bluerobotics.com/store/thrusters/t100-t200-thrusters/t200-thruster-r2-rp/). We don’t know a whole lot about the motors, but someone on the forums did some testing to characterize it (at 4A/16V):
Stator Resistance (R_s) = 0.1 ohm
Stator Inductance (L_s) = 0.03 mH
Back EMF Constant (B-EMF) = 1.687 Vrms/kRPM
Moment of Inertia = 5.85 uN*m*s^2
Friction Coefficient = 0.42 uN*m*s
Number of poles = 14 (7 pole pairs)
We have the Myxa powered off 18-25 V and are currently using RPM control. My objective is to find a way to eliminate acoustic noise (from both the motors and ceramic capacitors or inductors inside the Myxa) at 400kHz to 1MHz.
Myxa contains a step-down DC-DC converter that operates at 0.5 MHz. It is possible to adjust the switching frequency but it will either come with functional limitations (voltage/power limitations) or with minor hardware modifications (a larger inductor). We could perhaps modify a Myxa for you specifically; if you’re interested, please contact sales@zubax.com.
The DC-DC doesn’t seem to be an issue here (we don’t think), it’s the acoustic vibration from the motors which are being picked up by our ultrasonic microphones. On the spectrum analyzer we can see spikes every 47kHz, which are the harmonics of the PWM. If we change the PWM to the lowest (20kHz), then the peaks change to every 20kHz.
If we were to build a filter to try and kill the harmonics, would that negatively impact the performance of the motor control?
If we added spectrum spreading/dithering, would that help?
If your band of interest starts at 400 kHz, I don’t think there will be any noticeable effect on the motor control, so you can try. It is best to keep the cutoff frequency above the PWM frequency, though.
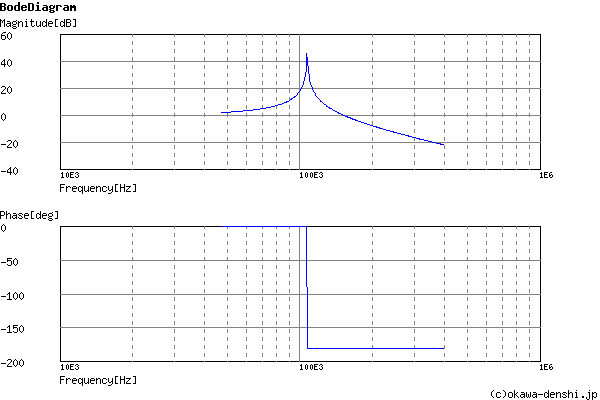
A simple 0.47 uH + 4.7 uF LC filter per phase yields a -20 dB attenuation at 400 kHz while having a negligible effect at the PWM frequency and below. Consider trying that first. The capacitors should be grounded together at the floating ground.
Consider using toroidal inductors and film capacitors.