I’m having difficulty updating my Myxas to Telega v0.3.
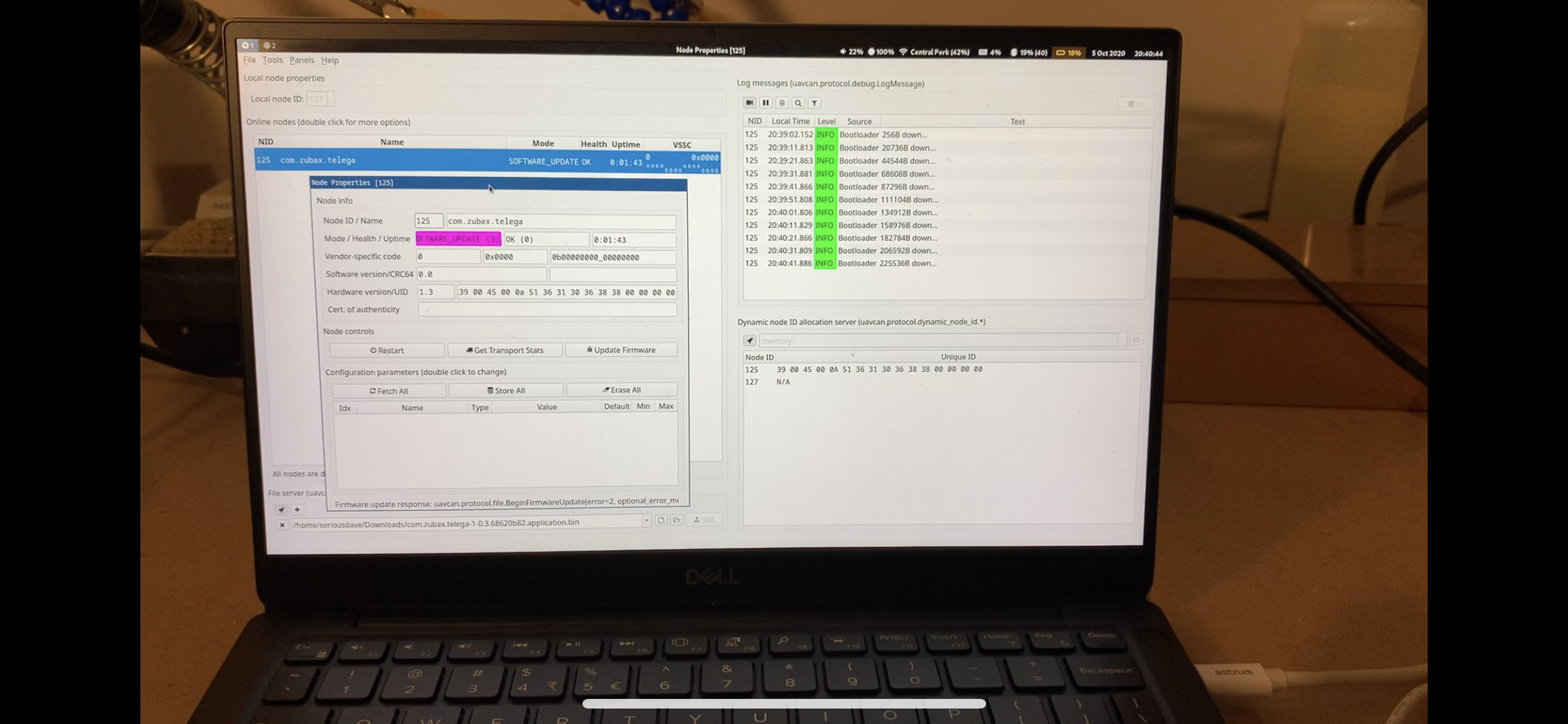
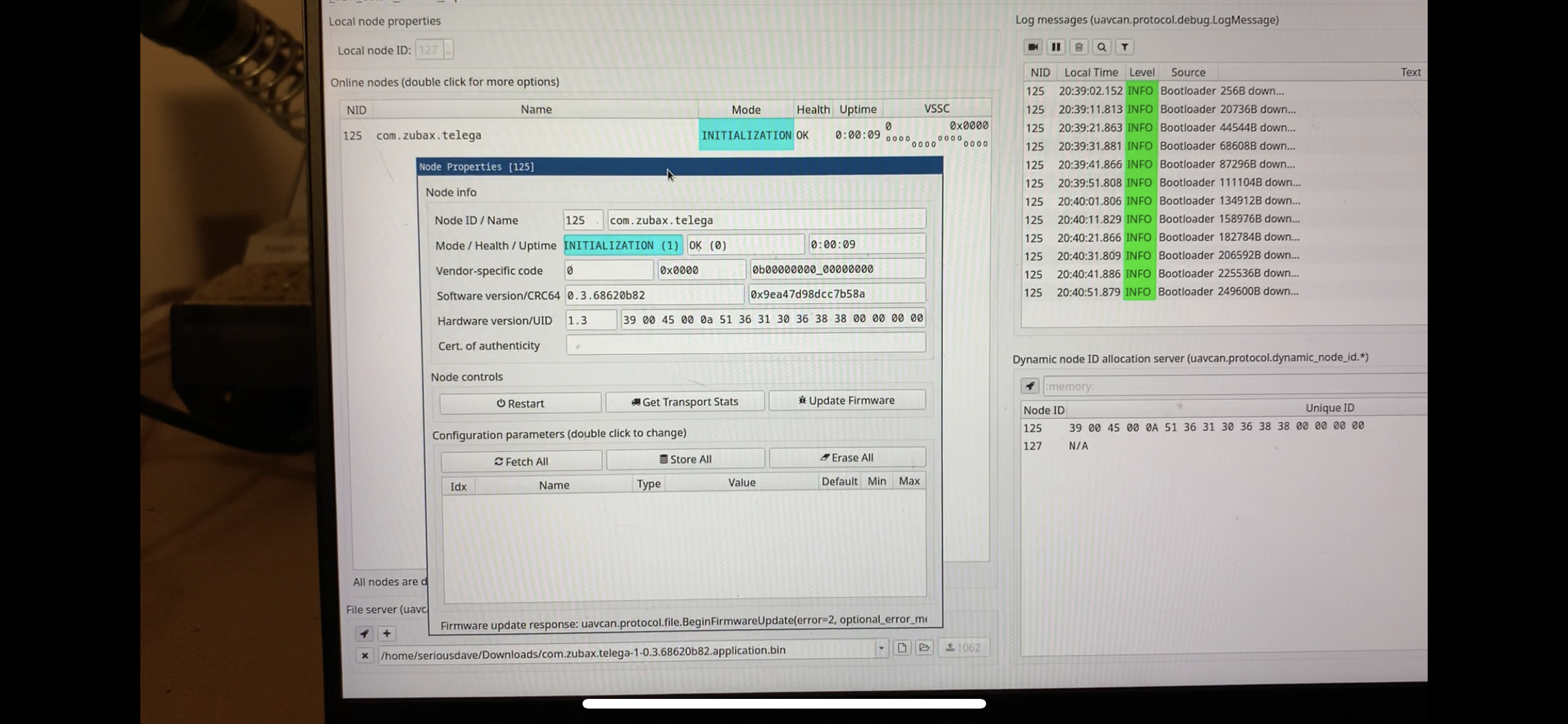
The update process appears to run smoothly using UAVCAN GUI Tool - the log messages reported by the bootloader indicate the firmware is being downloaded onto the device.
After that process is finished, the Myxa switches to initialization mode, but never seems to progress any further than the bootloader. It appears to be stuck in a perpetual reboot cycle every 10 seconds.
If you have a USB-UART adapter, can you please connect to the debug port (at 115200-8N1) and see what does it have to say about this failure? It is most likely caused by the lack of CoA; if yes, we have a mitigation for that.
Unfortunately I do not have such an adapter on hand - will add to my shopping list though. Is there a means for me to try the mitigation strategy in the interim?
Yes. Can you please run the update sequentially: first, upload v0.1, then v0.2, then v0.3? The reason is that there are certain permanent modifications to your hardware being made by v0.2 which are required for v0.3 to work.
I have the same issue upgrading to v0.3. Pavel, I cannot try your suggestion, since I get an error when uploading v0.1. I don’t recall the exact error, but it was something about a ‘bad firmware image’.
By the way, is there a change log for v0.3? I cannot find any information on it.
If you are upgrading the device which was bought earlier than the 2Q2019, you have to patch it.
Just download and flash this binary patch (265.5 KB). Then download and flash v0.3 firmware from the server. It should work.
Telega v0.3 changelog
The maximum no-load motor speed is increased by 18-25% (depending on the motor KV value).
The motor d-axis and q-axis currents and voltages are published in uavcan.protocol.debug.KeyValue UAVCAN messages. Keys are “idf”, “iqf”, “udf” and “uqf”.
Fixed the switching issue between voltage and speed control modes during field weakening activation and deactivation.
Fixed the motor speed saturation issue at 80-90% setpoint value in the ratiometric voltage control mode.
Introduced new parameters to improve motor characterization:
mid.phi.curr_bw - the current loop bandwidth for the motor flux linkage detection procedure.
mid.l.curr_bw - the current loop bandwidth for the motor inductance detection procedure.
Can you help me unbricking Myxa controller?
I had trouble upgrading it from v0.2 to v0.3 through uavcan and was getting bootloader errors (-3001 ?).
It was stuck in bootloader and I couldn’t revert it or flash anything.
Then i tried using the st-link hoping that i can leave the bootloader and flash application to following sector but I bricked it completely.
After the binary is flashed, the device may refuse to start with a missing signature error. To fix that, we will need you to tell us the unique-ID of the board which is stored as 12 bytes at 0x1FFF7A10. When we know the unique-ID, we will tell you the digital signature of the board that you will need to write at 0x800bf00.
Hi Pavel
I think we have a bricked Myxa here as well. We bricked it when trying flash v0.4 firmware we got from Dmitry.
The LED is yellow, and when we connect to it via a F7 Pixhawk Flight controller, the UAVCAN screen sees the Myxa but shows an error
As expected, the firmware update doesn’t work anymore.
I see your instructions to Mice5 on flashing a binary to the base address. How do you do that? Is there a tool or certain commands we can use to flash it? Is this only do-able on a linux computer? We have windows computers here running linux only in VMs.