I got Myxa and installed on quad drone.
I already have experience with Sapog. But Myxa is first time setup.
I am having a hard time to setup parameter.
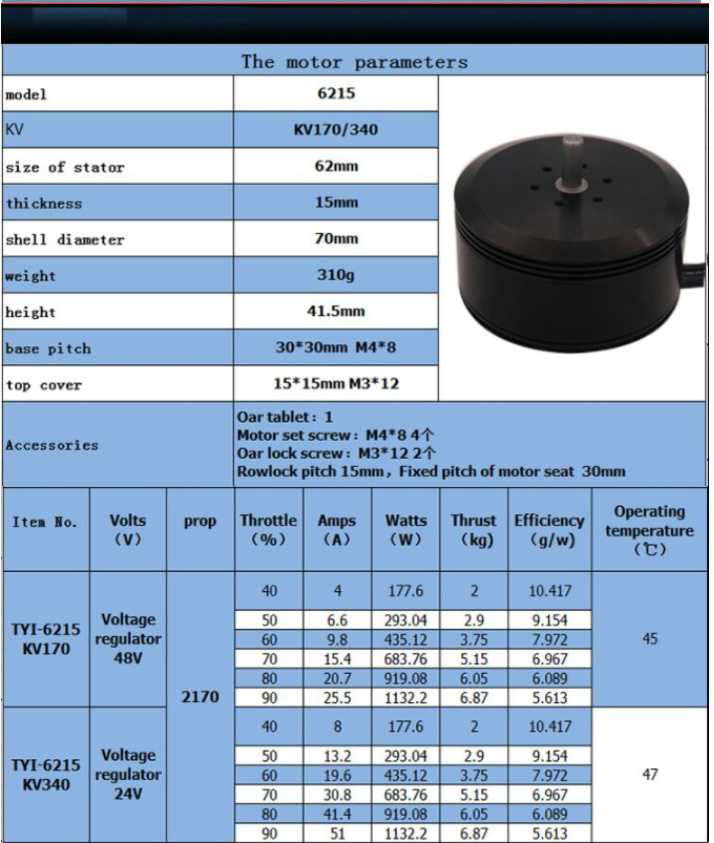
I use this kind of motor.(KV340)
The full description of the Myxa configuration you can find in the Quick Start Guide.
m.num_poles - the number of magnetic poles on the rotor; equals the number of magnets on the rotor; always an even number. Usually one can observe the magnets on the rotor from the back side of the motor. Otherwise, you can find the motor analogs, which have the documentation parameter named number of rotor poles. I suspect that this motor has 28 poles.
m.max_current - rated phase current of the motor, in amperes (more on this later). This parameter should be set to a value approximately equal to 1.2 - 1.5 of the maximum motor current. In your case, 60 - 70 Amps. Be aware that Myxa has the hardware overcurrent protection, which acts as a current limiting at the level approx equal to 60-62 A. Therefore, it is better to set this parameter to 60 A.
These parameters are enough to start the Motor identification procedure. All other motor parameters will be detected automatically.
Uavcan parameters:
uavcan.node_id - the UAVCAN node ID. If set to zero, which is the default, Myxa will attempt dynamic node ID allocation.
uavcan.esc_index - the index of this ESC on the vehicle. Set to zero by default; must be configured manually. This index is used by the autopilot.
You can start with the Voltage control mode. Usually it works well with the small and medium power motors But if the response is not enough you can switch to the RPM control mode.
The response tuning is described in this post.