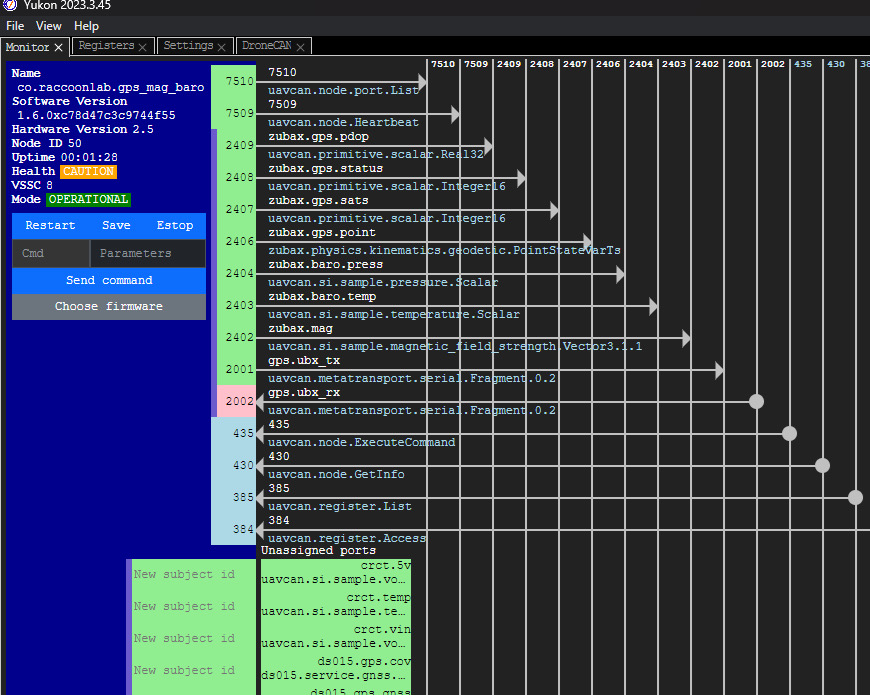
I’m buiding Drone which using FMU Pixhawk connecting with GPS module (RaccoonLab GPS MAG BRO V2.3.2) via Cyphal. Previously, it was working well (in QGroundControl we can see GPS data ). Unfortannally, FMU can not receive GPS signal. So i observered in Yukon: for GPS node, its Health status : CAUTION. i think this is reason.
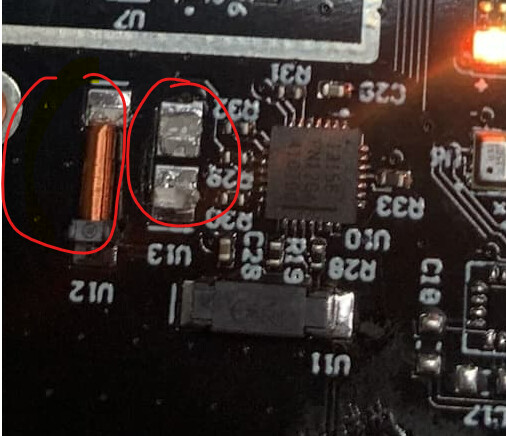
Yes, the problem is definitely with the magnetometer. One coil is broken and the other is missing. So it should be repeated (you can do it yourself by ordering this lcsc.com ) or disable magnetometer tasks if its possible in this firmware. @Dmitry is it?
Hi. In your firmware version, vvsc=8 indicates that the problem is related to the magnetometer. Since the mode is OPERATIONAL (not INITIALIZATION), it means that the GNSS at least found a valid date. @Hiep, can you check the related GNSS topics to ensure that GNSS is functioning correctly?
disable magnetometer tasks if its possible in this firmware
You can disable the magnetometer by disabling the corresponded topic, but this won’t bypass the hardware checks during board initialization, so the sensor issue will still be detected.
I think it makes sense to add a parameter with a bit mask to disable specific checks or even add a few parameters similar to PX4’s Circuit Breaker parameters. @Hiep If you decide to use the node without the magnetometer, I can prioritize releasing the additional parameters.