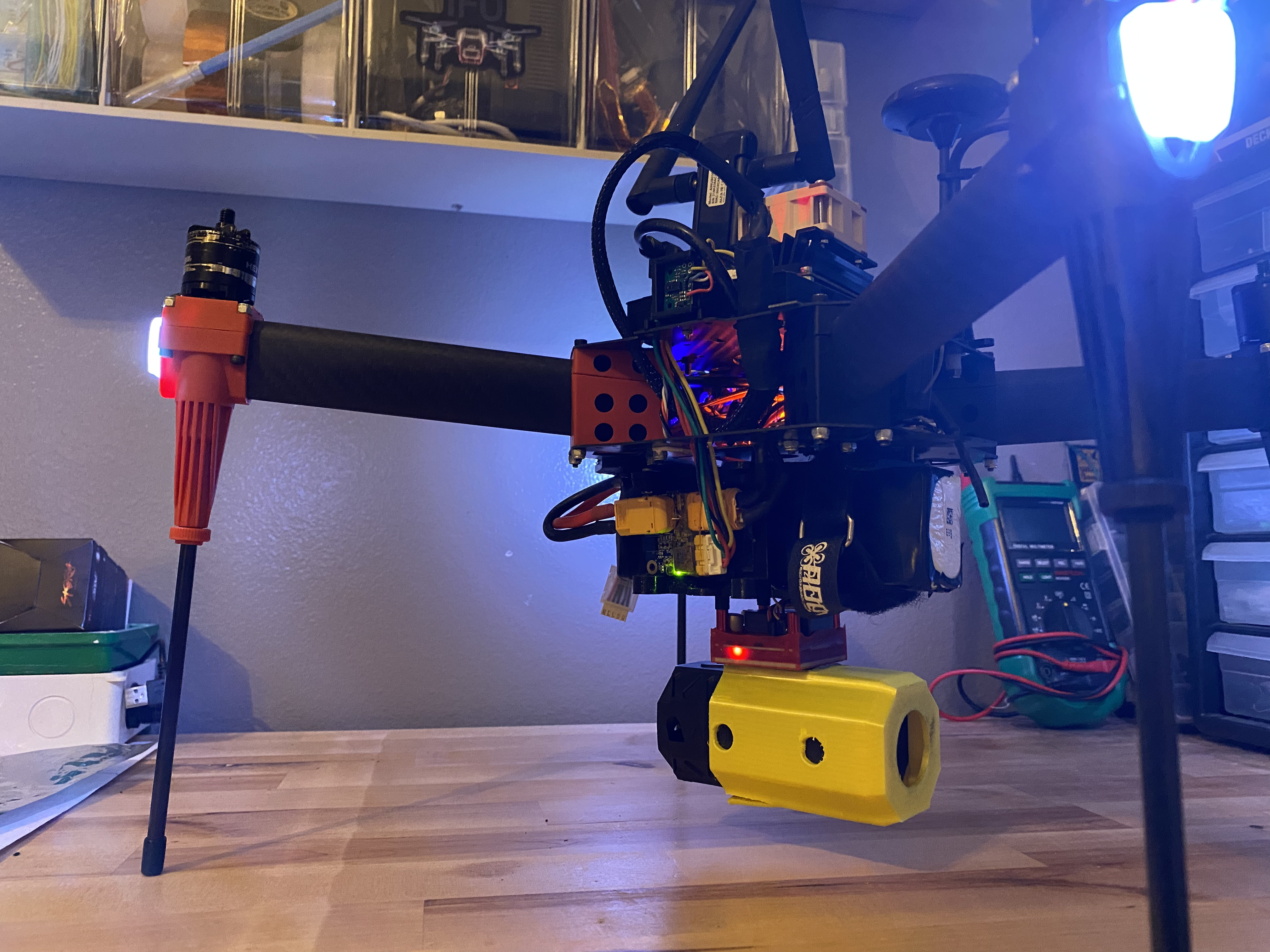
I am working on a multirotor based airsoft grenade dispenser using the Zubax FluxGrip. I have several videos in the works, but this intro video serves as the project motivation and I provide a small demo towards the end.
I use PWM for switching the EPM to magnetize and hold the payload. The PWM channel on the Pixhawk which is mapped to an AUX1 switch on my RC transmitter. The payload consists of an ASG Storm apocalypse impact grenade:
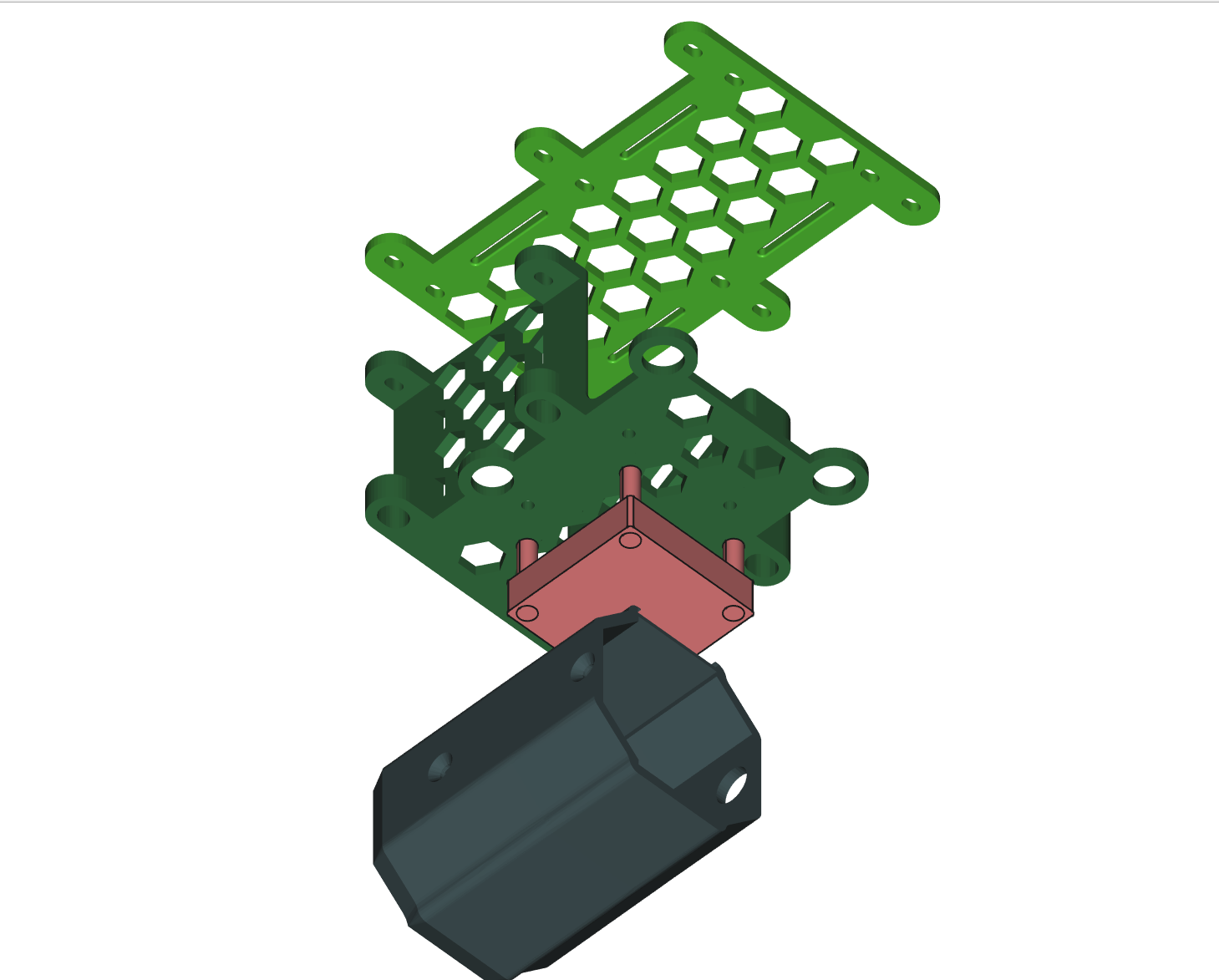
The Zubax FluxGrip interface to the drone frame is based off of a battery mount I found on thingiverse and modified to have mounting holes for the fluxgrip:
Any feedback/suggestions are welcome. This is my first project centered around an EPM. I usually use servos for payload and gimbal actuation, so this is new territory for me.
First ever drop test with the airsoft grenade was a success!
I first set COM_PREARM_MODE to 2 (always) so that the non flight actuators will be active even if the drone is disarmed. This prevents me from having to attach the grenade with the motors + props spinning
I went ahead and assigned the FluxGrip PWM channel to RC AUX1 port via the Control Allocation page. AUX1 is is mapped to my RC switch.
Alternatively, you can also assign the PWM channel as a gripper if using a joystick.
Nice build, and thanks for sharing the details. A few practical suggestions that may improve reliability/safety:
Add a release interlock so the drop command is accepted only under explicit conditions (e.g., altitude/speed window + dedicated arm switch + optional long-press).
Keep a deterministic actuator state machine (HOLD/RELEASE) with a timeout and a clear default state after FC reboot.
Log the release command and actuator output in the flight log so each drop can be verified post-flight.
Validate behavior on power transients (brownout/reboot) to ensure the payload cannot release unexpectedly.
If possible, bench-test EM interference near GNSS/compass and secure wiring mechanically; release mechanisms see lots of vibration.
Using COM_PREARM_MODE=2 for ground handling is a good trick, just ensure you have a physical safety workflow while loading.
If you publish your final mounting STEP/STL and wiring sketch, others will probably reuse this setup.