Devops for a Zephyr RTOS project
Introduction
Before digging into the details, this is a high-level overview of our CI setup:
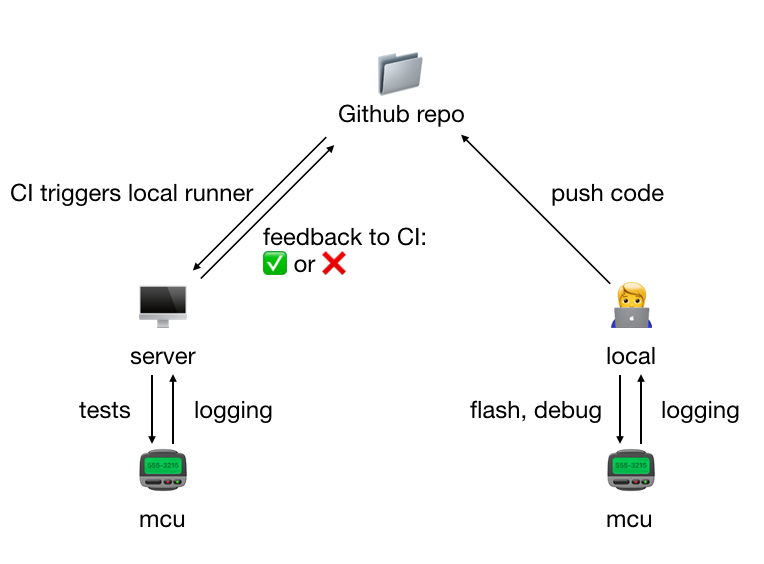
As you can see in the image above, it consists of 3 parts:
- local: a Macbook Air in my case.
- server: any old desktop should do!
- Github repo: lives in some Microsoft server park?
Now as you might notice, this setup requires you to have 2 boards instead of 1. This is not strictly necessary: it is perfectly possible to ssh into the server setup while you’re sipping a cocktail in the Bahamas (“work” from “home”, amirite?) and flash/debug the board in this way. The only real downside is that sometimes it might be necessary to connect some oscilloscope, measure some voltage or make some other adjustment to the setup requiring to physically interact with the server setup (who is working on this?).
Note: I’m assuming you have already set up the Zephyr toolchain, as well as have some familiarity with how it works. If this is not the case, you should probably check out Zephyr’s Getting Started Guide.
With that preamble out of the way, let’s get down to business.
1. Set up the repository
Relevant documentation:
As discussed in Application Development, there are 3 ways to structure the project directory (as supported by west):
-
repository application
The application is located within the Zephyr source code repository. This type of application is appropriate for developers who want to make changes or contributions to the Zephyr operating system itself.
-
workspace application
The application is located within a Zephyr workspace, but outside the Zephyr repository itself. This type of application is appropriate for developers who want to build and test their application using Zephyr, but without making changes to the source code.
-
freestanding application
The application is located outside a Zephyr workspace.
We will be using the second approach:
cd ~
mkdir zephyr-project-template
cd zephyr-project-template
git init
git remote add origin git@github.com:maksimdrachov/zephyr-rtos-template.git
Now the first Zephyr-specific step is creating a hidden .west folder that contains a config file:
cd ~/zephyr-project-template
mkdir .west
cd .west
touch config
.west/config:
[manifest]
path = zephyr
file = west.yml
What this does: it tells west that there’s a zephyr folder in our project directory which contains a west.yml file. In turn, this file will tell west about other garbage boilerplate that will need to be fetched to set up our repository.
As you can probably guess the next step is adding Zephyr (as a submodule). However, instead of adding mainline Zephyr, I recommend using your own fork. While not ideal (it is highly recommended to not stray too far from the official Zephyr repository) however sometimes small changes will need to be made to the Zephyr code base. It makes sense to keep track of such changes in your own fork.
cd ~/zephyr-project-template
git submodule add https://github.com/maksimdrachov/zephyr zephyr
Our project directory should now look something like this:
.west/
config
zephyr/
west.yml
#lots of zephyr files
Now we can run west update which will fetch all of necessary boilerplate.
Before we continue, let’s make sure that we don’t include this boilerplate in our application repository:
Copy this to `.gitignore`
# Prerequisites
*.d
# Compiled Object files
*.slo
*.lo
*.o
*.obj
# Precompiled Headers
*.gch
*.pch
# Compiled Dynamic libraries
*.so
*.dylib
*.dll
# Fortran module files
*.mod
*.smod
# Compiled Static libraries
*.lai
*.la
*.a
*.lib
# Executables
*.exe
*.out
*.app
# macOS
.DS_Store
# Zephyr
bootloader/
/modules/
tools/
build/
zephyr-project-template/build/
twister-out*/
# .vscode
.vscode/.cortex-debug*
# Python
venv/
__pycache__/
# scripts
scripts/platform-tests-results/
*.bin
# nox
.nox/
.pytest_cache/
.coverage*
# SonarCloud
.scannerwork/
If you’ve done everything right, git status should return the following:
$ git status
On branch main
Your branch is up to date with 'origin/main'.
Changes to be committed:
(use "git restore --staged <file>..." to unstage)
new file: .gitmodules
new file: zephyr
Untracked files:
(use "git add <file>..." to include in what will be committed)
.gitignore
.west/
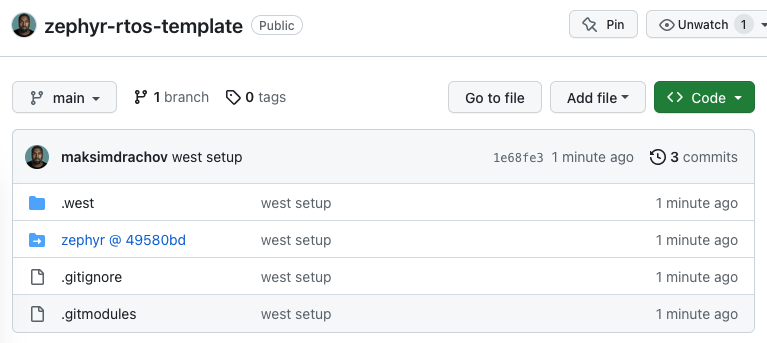
Commit/push and you repo should look as follows:
2. Define a minimal template for an application
Before we continue with creating our own custom application, let’s first make sure your Zephyr toolchain is set up correctly, try running the following two commands back-to-back, and make sure the LED on your board starts blinking:
cd ~/zephyr-project-template
west build -b <BOARD> ./zephyr/samples/basic/blinky
west flash
(If this is not working, I’m sorry to report: you have failed to set up the Zephyr toolchain correctly.)
Make sure west build is using Zephyr from your application folder:
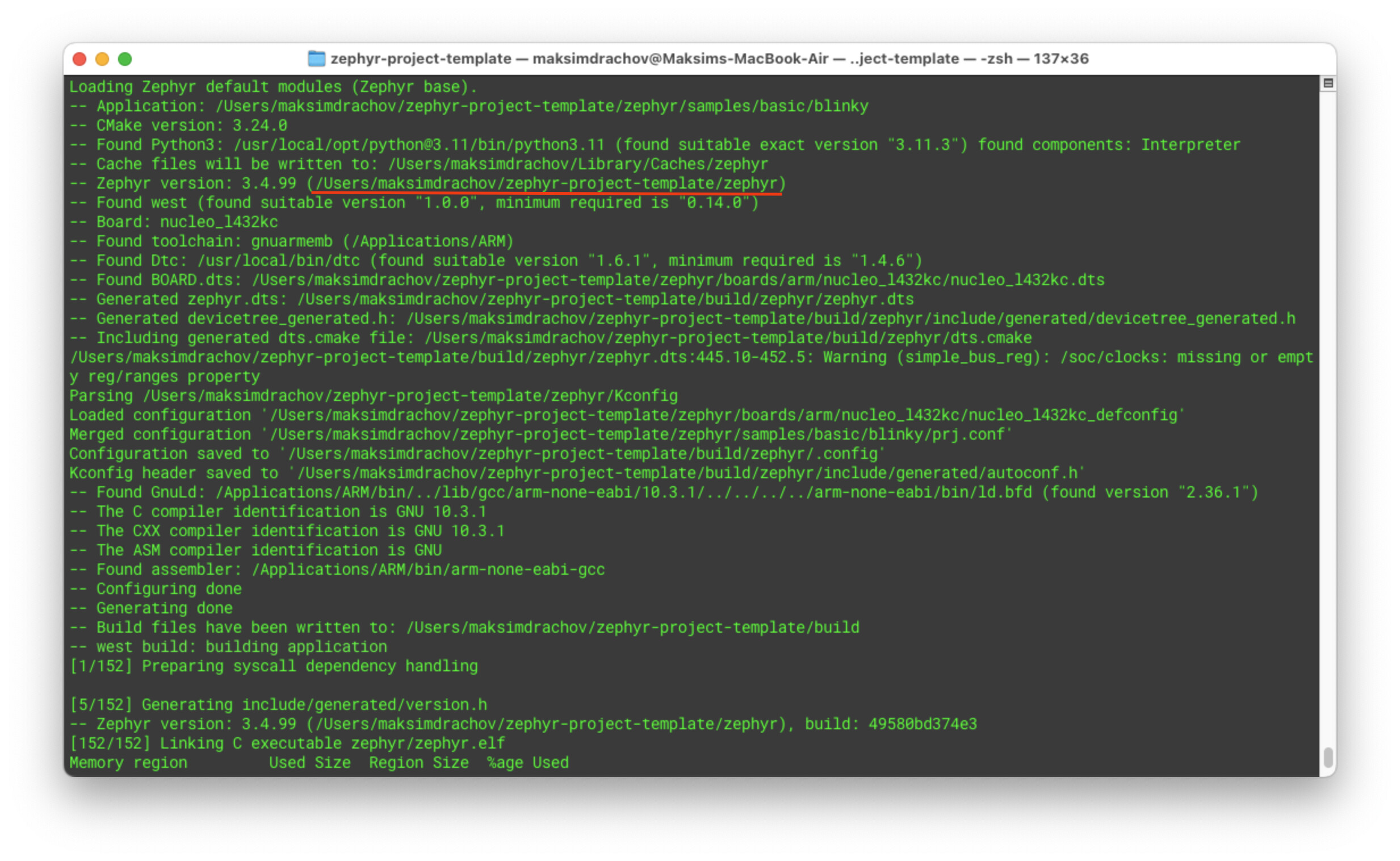
A successful flash:
Now that the Zephyr part is set up, we can move on to creating our own custom application.
cd ~/zephyr-project-template
mkdir app
To simplify life, just copy the contents of zephyr/samples/basic/blinky to /app:
app/
CMakeLists.txt
prj.conf
src/
main.c
Now, try to build/flash from your own custom app directory:
cd ~/zephyr-project-template
rm -rf build # clear the previous build
west build -b <BOARD> ./zephyr/samples/basic/blinky
west flash
To debug the application:
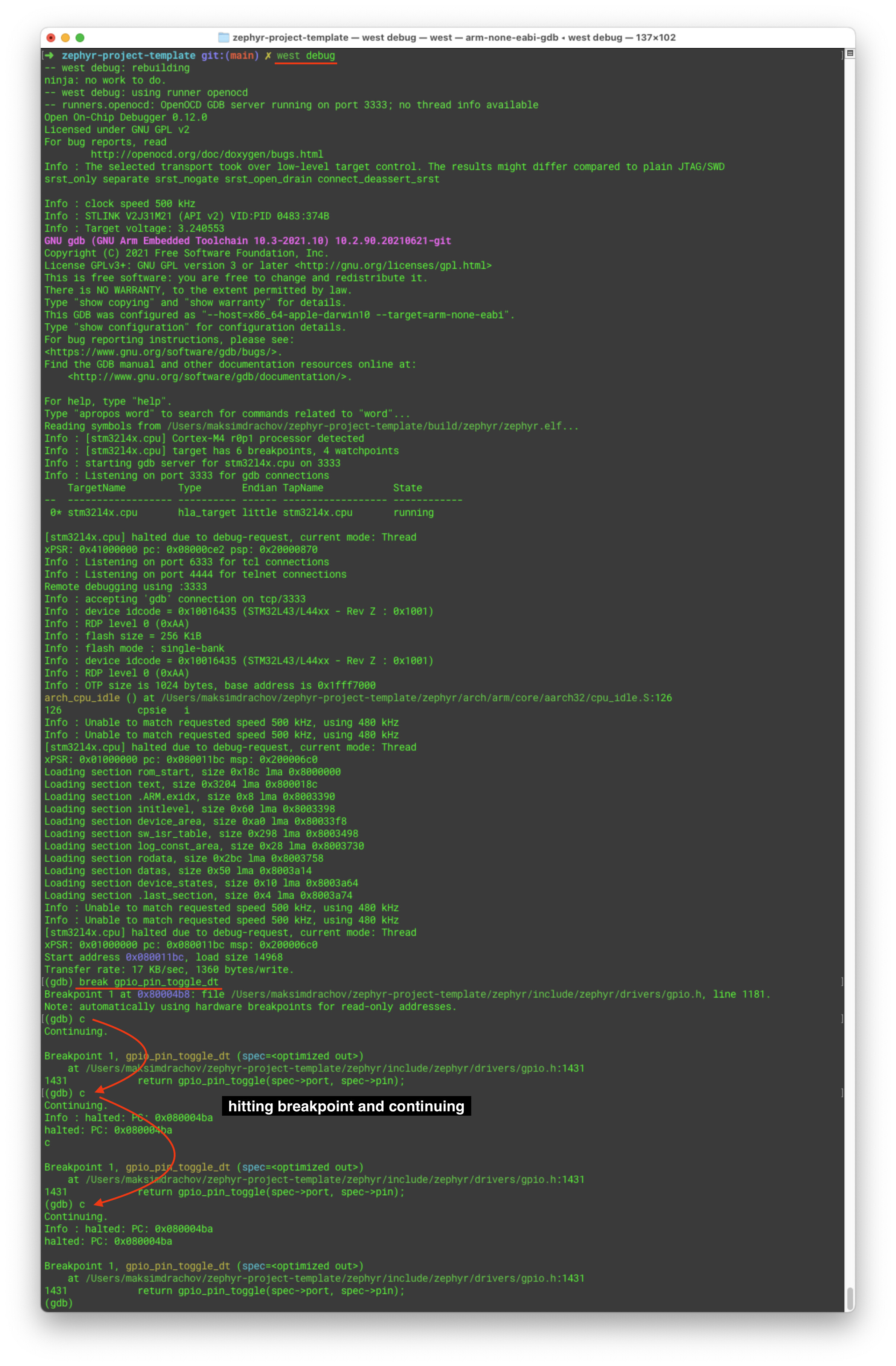
west debug
Example (using blinky, hits a breakpoint everytime the led is switched on/off):
Last but not least, it is often useful to use the serial port during debugging:
cd ~/zephyr-project-template
rm -rf build
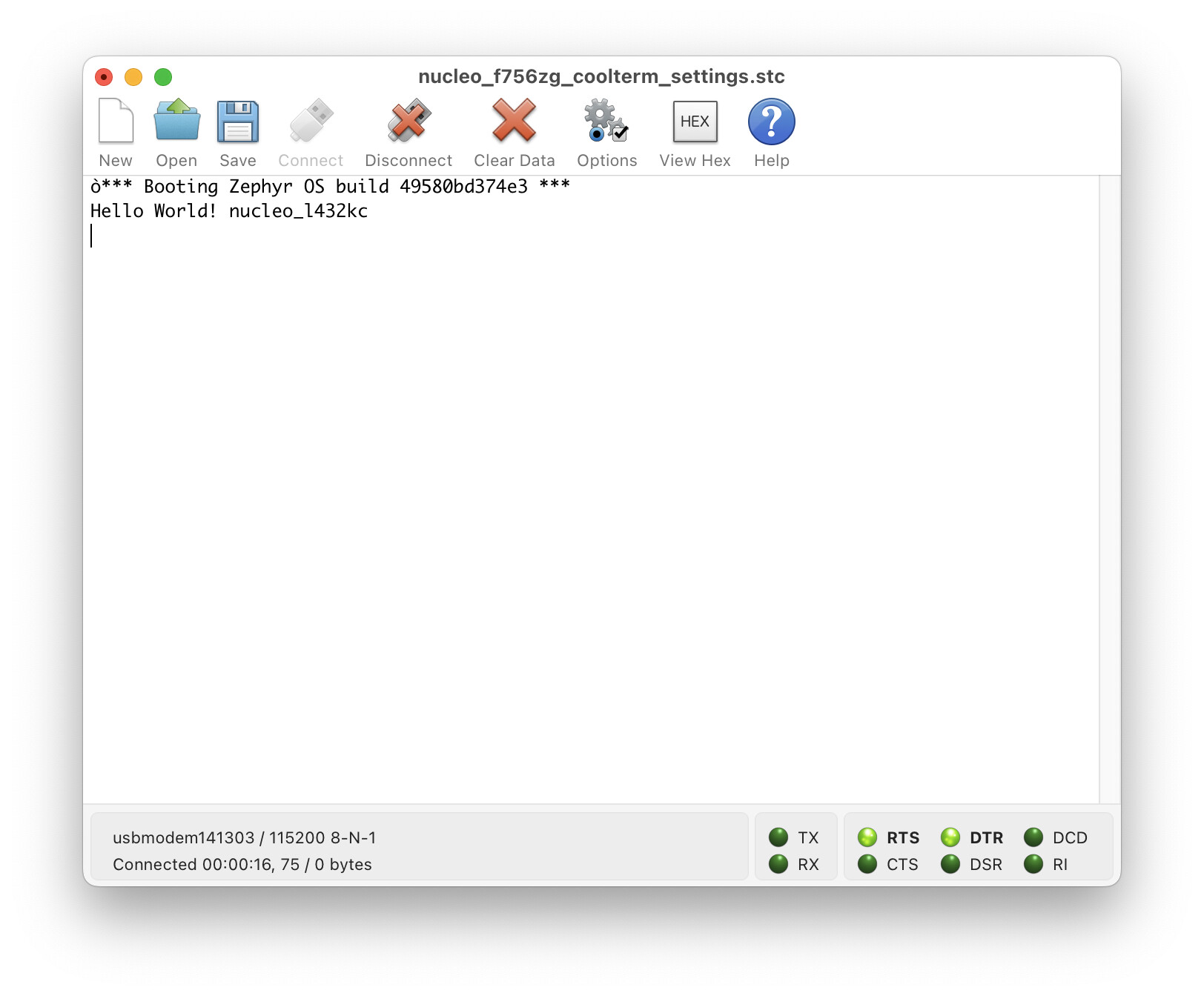
west build -b <BOARD> ./zephyr/samples/hello_world
west flash
On my local setup (macOS) I use CoolTerm (see here how to setup):
On GNU/Linux, picocom or minicom can be used:
picocom /dev/serial/by-id/...
minicom -D /dev/serial/by-id/...
Windows? I don’t know man, I feel sorry for you (maybe try PuTTY).
3. Set up a minimal unit testing template
Relevant documentation:
To save myself some time, I will quote the CEO/CTO directly here:
The software verfication will be performed using the following utilities:
- Unit testing suites for each component of the software. These are arranged as dedicated executable build targets, where each target executes on the target hardware with the in-circuit debugger connected. Upon execution, the unit testing suite will run the collection of unit tests and report the outcome to the host computer via the
semihostingserial interface.- Integration test suite for the production software. This component will be implemented as a script that runs on the well-instrumented host computer with the product running the production software connected to said computer via the regular communication interfaces expected to be leveraged in the final application (e.g., CAN bus, RCPWM, etc.). The script will excite the device and verify that the response matches the expectations set forth by the datasheet and other documentation. The integration test suite should be based on PyTest.
I couldn’t have said it better myself (or more complicated), thanks Pavel.
Btw, if you’re wondering what the difference is between unit and integration tests: unit tests are for testing the code base (ex: making sure the functions return the correct output receiving a given input); integration tests take place at a higher level of abstraction: we flash the MCU with our app code and then give it some input (from the outside) and measure the output (ex: our server sends a CAN message, which should result in some pin being set high).
Start by adding a verification folder to your directory:
zephyr-project-template/
verification/
unit/
000_template/
CMakeLists.txt
prj.conf
src/
main.c
testcase.yaml
Note: for your own additional unit tests, you will create additional directories (ex: unit/001_CAN).
Now we’d like to run this unit test on the board and get a report of the result.
First make sure the unit test can be built:
cd ~/zephyr-project-template
west build -b <BOARD> ./verification/unit/000_template
If that works (it should), we can try to run the test using twister:
cd ~/zephyr-project-template
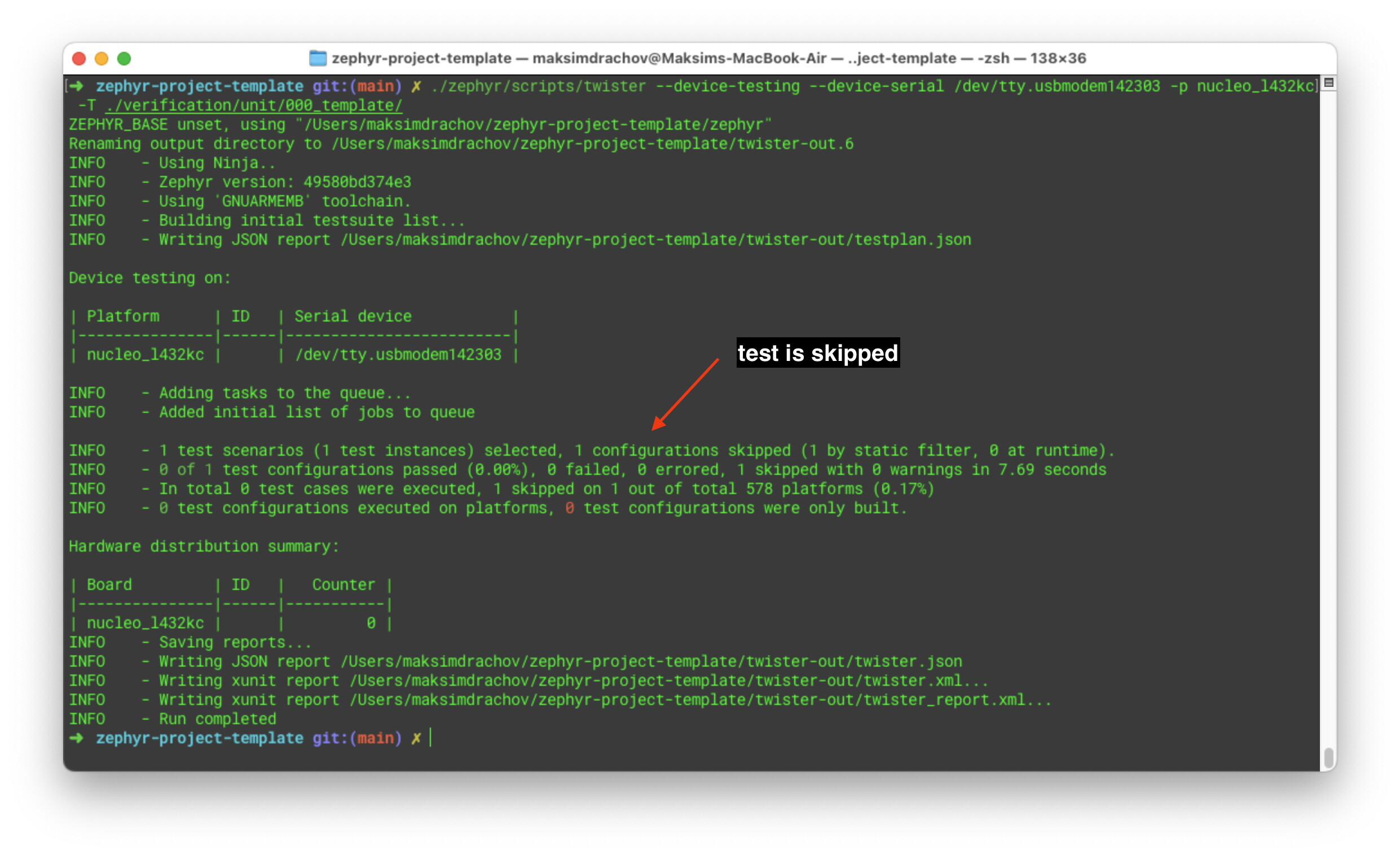
./zephyr/scripts/twister --device-testing --device-serial /dev/tty.usbmodem142303 -p <BOARD> -T ./verification/unit/000_template/
(If you’re interested what each argument means, see: ./zephyr/scripts/twister --help)
If you’re on macOS, you might have the following issue:
After going through a debugging rabbit hole, I can report that it can be fixed by adding the following line to zephyr/boards/arm/nucleo_l432kc/nucleo_l432kc.yaml:
identifier: nucleo_l432kc
name: ST Nucleo L432KC
type: mcu
arch: arm
toolchain:
- zephyr
- gnuarmemb
- GNUARMEMB # ADD THIS
- xtools
ram: 64
flash: 256
supported:
- nvs
- pwm
- can
- counter
- spi
(This is why it’s useful to have your own Zephyr fork)
A successful run looks like this:
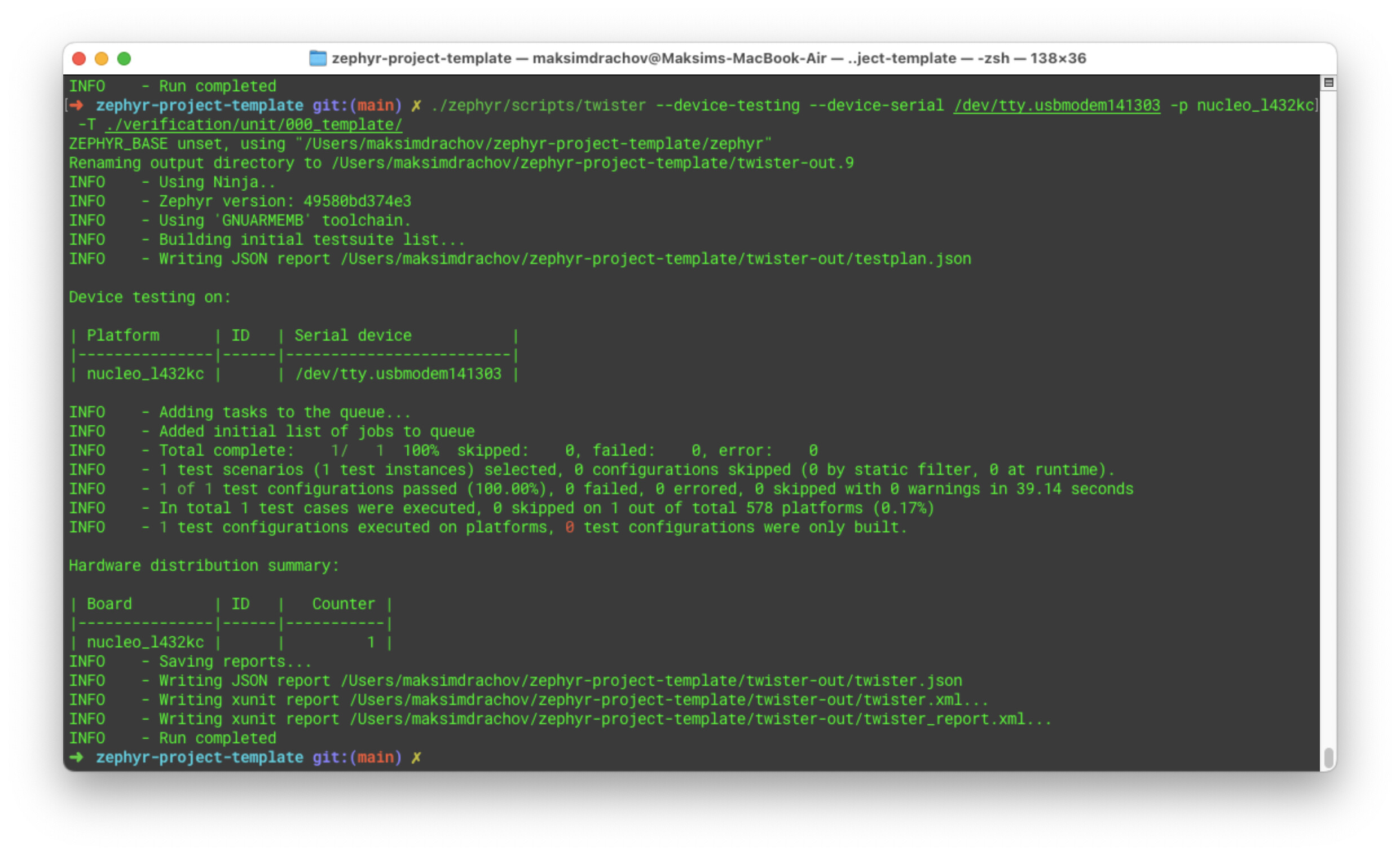
zephyr-rtos-template/twister-out/twister.log contains a log of the test run:
*** Booting Zephyr OS build 49580bd374e3 ***
Running TESTSUITE template
===================================================================
START - test_template
test finished!
PASS - test_template in 0.002 seconds
===================================================================
TESTSUITE template succeeded
------ TESTSUITE SUMMARY START ------
SUITE PASS - 100.00% [template]: pass = 1, fail = 0, skip = 0, total = 1 duration = 0.002 seconds
- PASS - [template.test_template] duration = 0.002 seconds
------ TESTSUITE SUMMARY END ------
===================================================================
RunID: 2f03d0ef6b5e57071de7fc255c72967b
PROJECT EXECUTION SUCCESSFUL
4. Set up a minimal integration testing template
Now on to the second part of verification: integration tests.
As previously explained verification takes place at a higher level of abstraction, and assumes that we are interacting with our MCU from the outside (using our local computer/server). To help us with this, we will be using the PyTest framework.
Start by adding a integration folder to your directory (copy the files from the repo):
zephyr-project-template/
verification/
unit/
integration/
tests/
test_000_flash.py
noxfile.py
pyproject.toml
requirements.txt
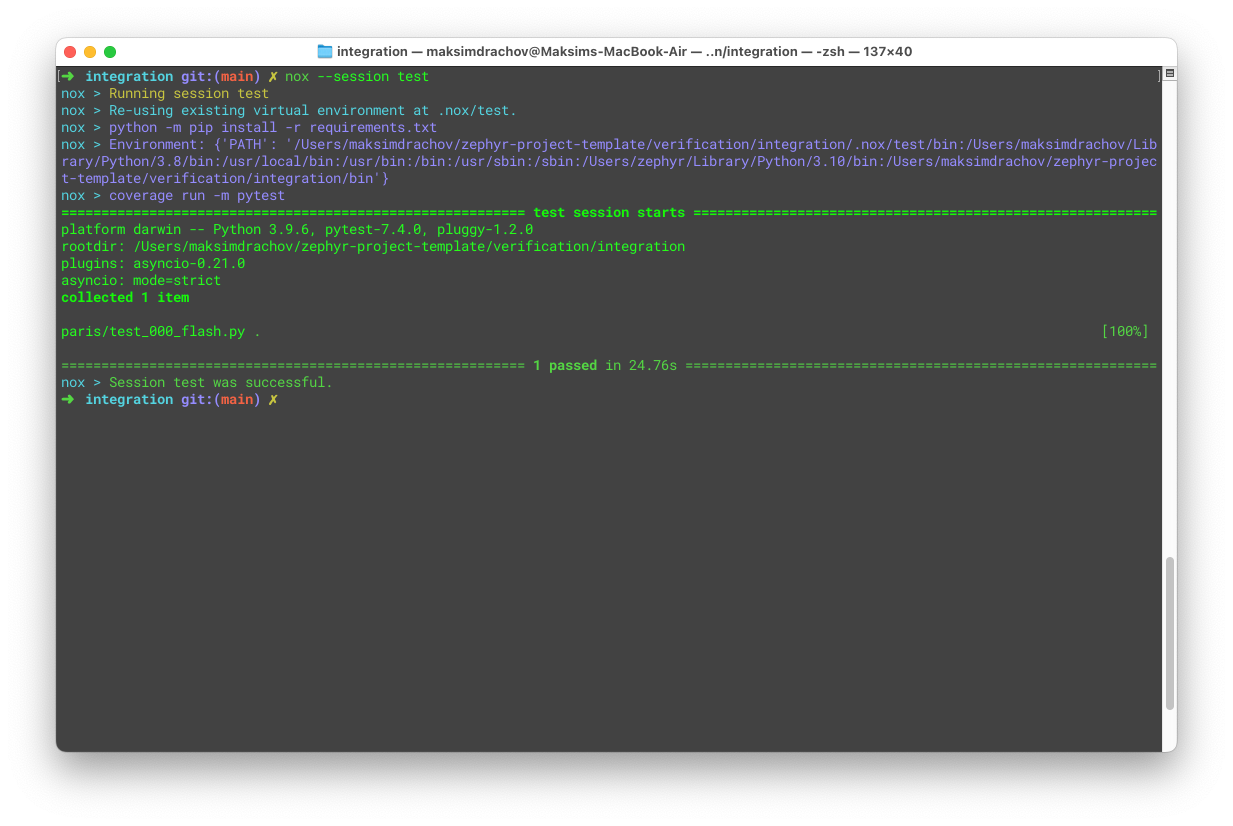
Now if you’ve done everything correctly:
cd ~/zephyr-project-template/verification/integration
nox --session test
Result:
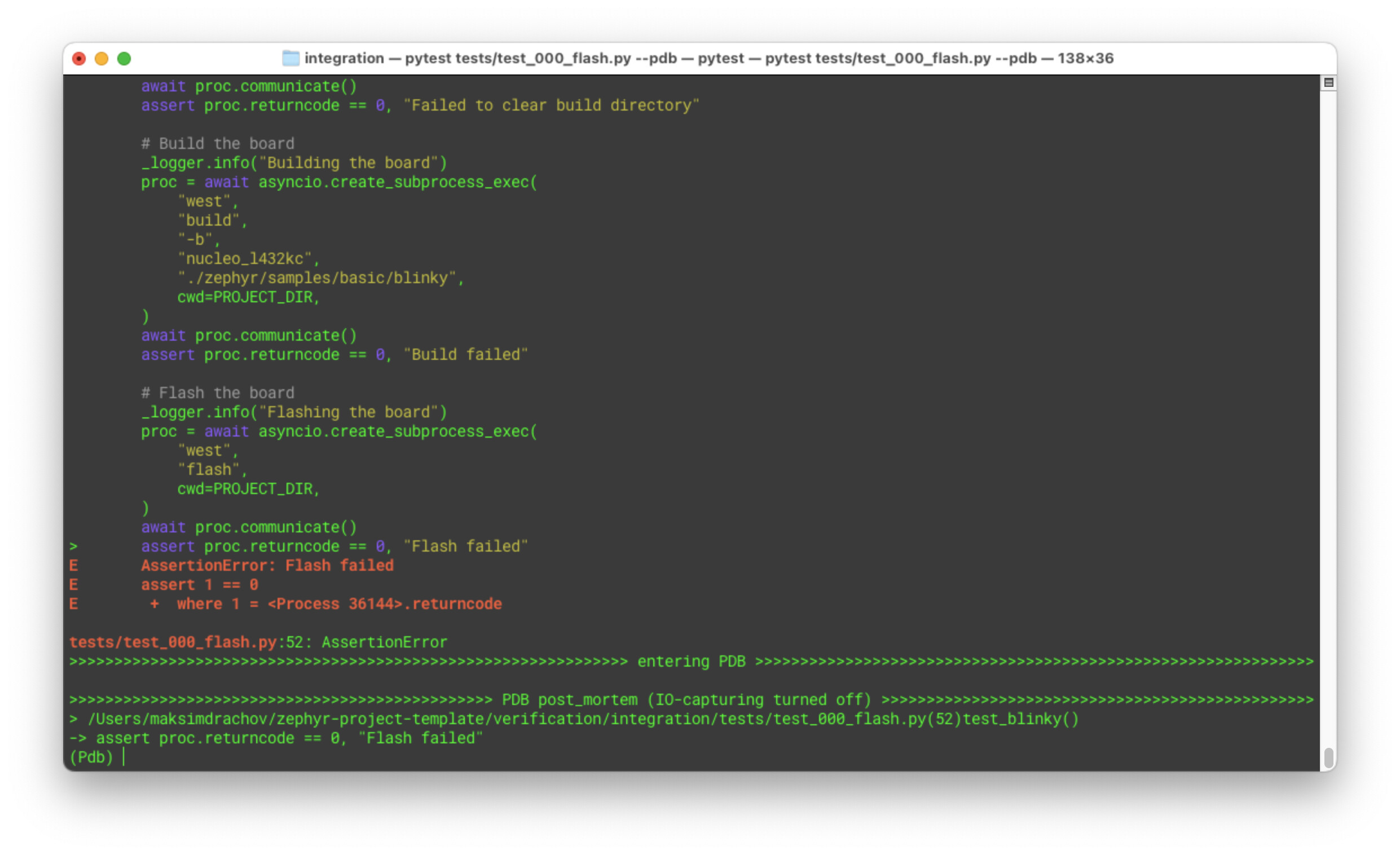
To run a single unit test (in debug mode):
pytest tests/test_000_flash.py --pdb
If you disconnect the MCU, it should fail in the following manner:
5. Setting up Clang-Tidy and Clang-Format
PS: Before continuing with this section, make sure to make the following changes to Zephyr: Every include of Zephyr is a SYSTEM include.
Since we want to make sure that Clang works on both app code as well as verification/unit, we will need to add it as a shared CMake module (stored in cmake/modules/ZephyrBuildConfig.cmake). Update the relevant CMake files to include this module:
app/CMakeLists.txtverification/unit/000_template/CMakeLists.txt
Now every time we do west build it should automatically run Clang-Tidy:
west build -b <BOARD> ./app
Setting up Clang-Format is done in a very similar way (see the CMakeLists files mentioned above).
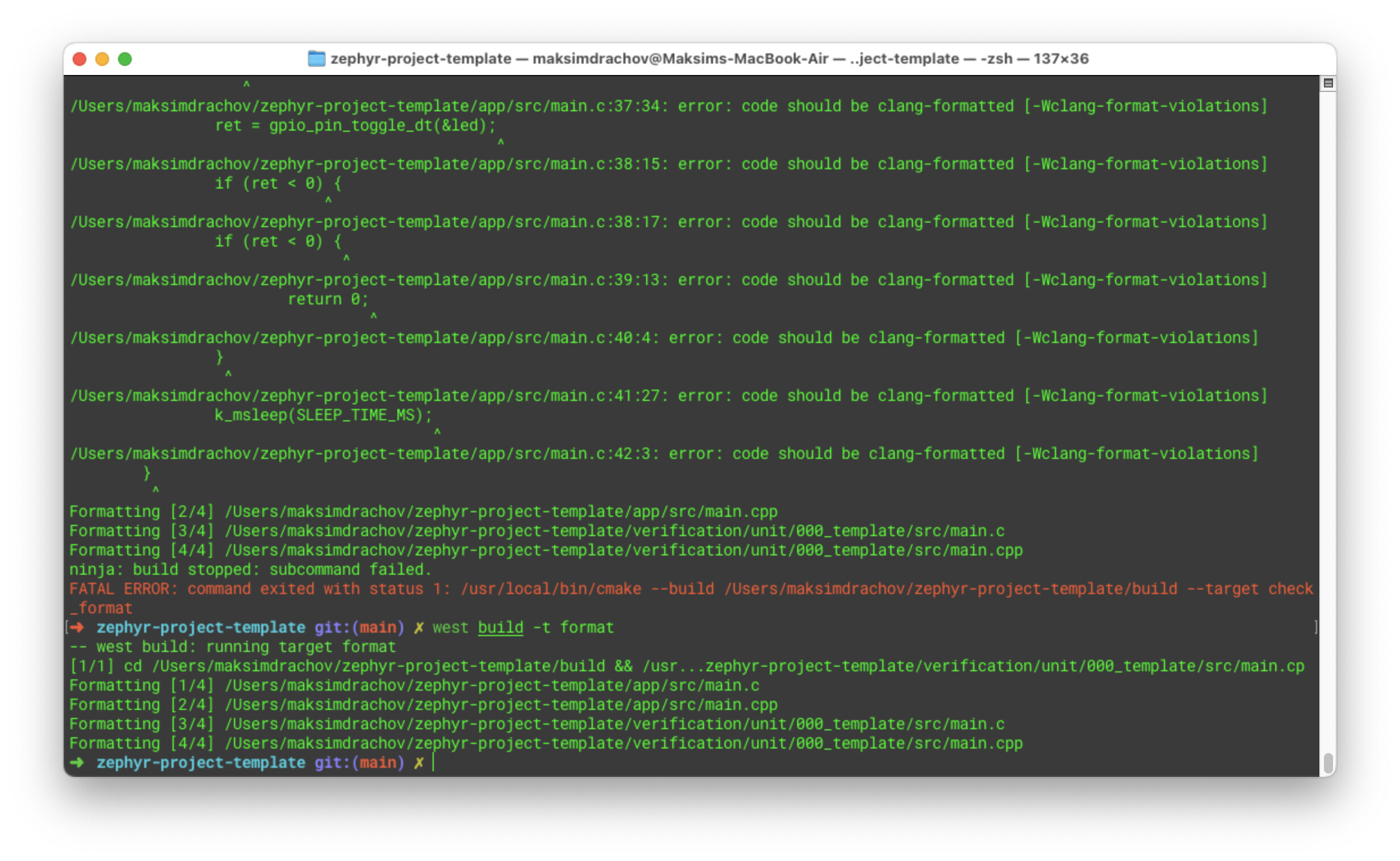
To run Clang-Format:
west build -t check_format
west build -t format
6. Setting up the CI
The final step is setting up the self-hosted runner for the CI:

As you can see, I’m using a Raspberry Pi (400), the instructions on how to set up (make sure to select Ubuntu Server 64 bit):
Next, you’ll want to install the Zephyr SDK and verify that you are able to flash a simple blinky:
Then you’ll need to setup a self-hosted runner, Github provides clear documentation on how to do this:
- About self-hosted runners
- Adding a self-hosted runner to a repository
- Configuring the self-hosted runner application as a service
Once you have done these steps, you can start with setting up your repo to make use of this self-hosted runner.
Create a new folder called .github, which will contain the steps/actions executed by the local runner:
.github/
workflows/
main.yml
In main.yml:
name: CI pipeline - build
on:
- push
#- pull_request # disabled due to security consideration (but useful to enable): https://docs.github.com/en/actions/hosting-your-own-runners/managing-self-hosted-runners/about-self-hosted-runners#self-hosted-runner-security
jobs:
build:
runs-on: [self-hosted, framboos] # framboos = raspberry in dutch, framboos is our self-hosted runner RPI
if: contains(github.ref, '/main')
steps:
- uses: actions/checkout@v3
# with:
# Private submodule access requires token
# token: ${{ secrets.ACCESS_TOKEN_FOR_GITHUB }}
# ssh-key: ${{ secrets.SSH_PRIVATE_KEY }}
- name: Setup
run: |
./scripts/setup.sh
- name: Build
run: |
. venv/bin/activate
west build -b nucleo_l432kc ./app
- name: Check Clang-Format
run: |
west build -t check_format
- name: Flash app
run: |
west flash
- name: Run unit tests
run: |
./scripts/run_unit_tests.sh
- name: Run integration tests
run: |
. venv/bin/activate
cd ./verification/integration
nox --session test
cd ../..
Conclusion
Now you should be able develop your Zephyr application while having a decent CI to catch any errors/mistakes.
Other interesting blogs on this topic:
moderndev.pl/posts/zephyr-rtos-tutorial