I am trying to get my Zubax GNSS v2 connected to APM according to instructions at docs.zubax.com/zubax_gnss_2/tut … ixhawk#GPS, but the BRD_CAN_ENABLE parameter that these instructions state I should change is not present.
“Open Mission Planner, navigate to the tab CONFIG/TUNING, and set the parameter BRD_CAN_ENABLE to 2.”
Is this a Zubax GNSS firmware issue, similar to the discussion in this post: viewtopic.php?f=4&t=12?
Any other thoughts as to what I should do to connect to Pixhawk?
Thanks,
Tyler
Hi Tyler,
You’re probably using an old version of APM. What version you’re using?
BTW, the thread you linked to is not about Zubax GNSS firmware issue, it’s about outdated UAVCAN support in APM (this has been fixed in APM).
Pavel.
Hi Pavel,
Thanks for the quick reply. I am almost certain that the current APM firmware version is 3.3.3, which I believe is the latest. I will try to confirm this.
—> Update:
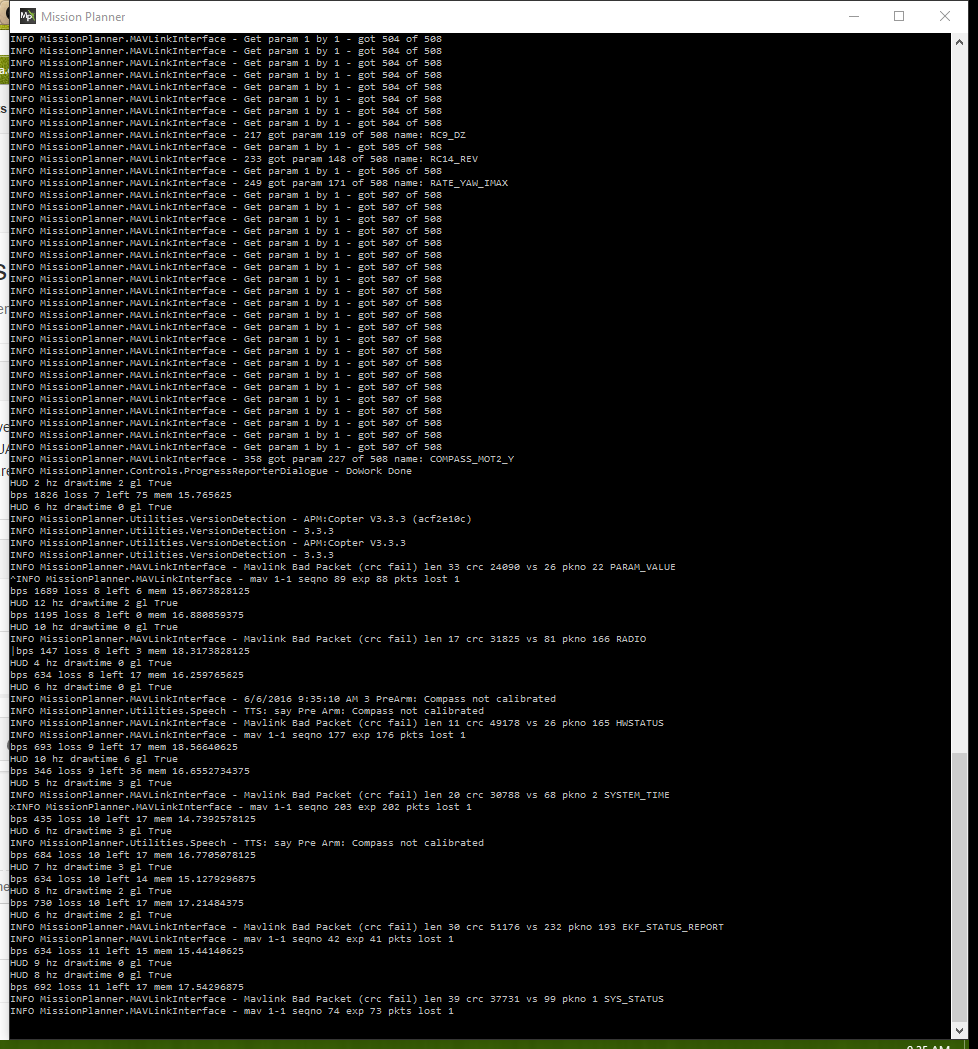
I’ve attached a screenshot of the console window in Mission Planner shortly after I connected to APM via Mission Planner and it shows I am using APM Copter version 3.3.3.
Any thoughts on what else I should try?
Thanks!
Tyler
Hi Tyler,
I suggest you to try ArduCopter beta: github.com/ArduPilot/ardupilot/ … opter-beta. I’m not sure if it’s available from MissionPlanner.
Sorry about these inconveniences. We have very limited influence on the development of APM.
Pavel.
Pavel,
Are you able to give any indication or point me to where I can find out how stable the beta version 3.4 is? I am just concerned of something going wrong with my system as it is very expensive.
Thanks,
Tyler
Unfortunately, the best I can do is to direct you to the APM mailing list with this question: groups.google.com/forum/#!searc … wr6rXlAgAJ
They say that it’s supposed to be reasonably reliable, but I wash my hands.
Let me know if I can further help you with this.