Hello everyone,
We’re testing the quadcopter with Myxas based on Cyphal and Telega v1 firmware.
The setup is at below:
Frame: Tarot X4 (960)
ESC: Myxa (firmware: telega v1)
Motor: TMotor MN5212 KV340
Propeller: TMotor CF 18x61
FMU: Pixhawk v5x
Battery: Tattu 6s 22000mah
Total weight : 6,4kg
We can easy take off and flight with the 6s 1550mah battery (total weight is about 3,6kg). When replace the battery with the big one (22000mah), the quadcopter can not take off and hover. The maximum thrust of motor and propeller is 4355g each when 100% throttle (specification from TMotor), which is >17000 thrust of four (this should be enough for taking off and hovering).
Is there something wrong ?
The register values of one of escs attached 122.yaml (5.3 KB)
My first guess would be that you’re running out of battery voltage. To find out for sure, we’ll need to subscribe to the dq subject and check the voltage vector magnitude; if \sqrt{u_d^2+u_q^2} \approx \frac{u_\text{dc}}{\sqrt{3}}, then the assumption is true — the speed is limited by the battery voltage. To address this, you could choose a motor with weaker flux linkage (i.e., higher velocity constant K_v), or use larger propellers.
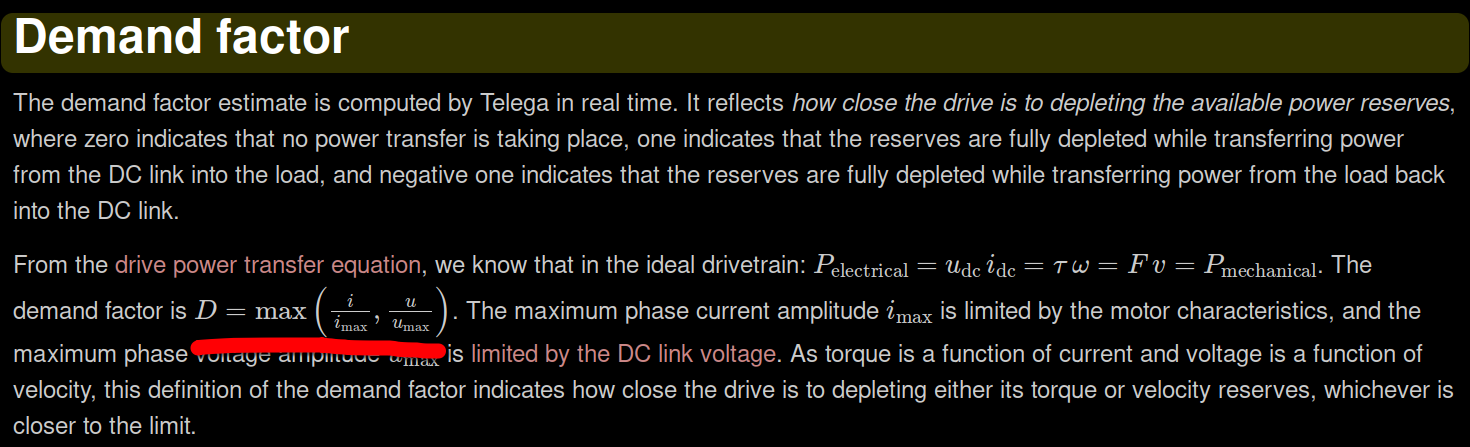
Another way to check for saturation is to subscribe to the feedback subject and ensure the demand factor does not reach 1 (in magnitude). More about the demand factor in the docs. Keep in mind, however, that the demand factor is also a function of the curent limit, but we assume that in your case the phase current amplitude is far from reaching 38 A:
If you know the torque created by your propeller, you could plug the numbers into the motor model and see how it performs in your scenario (be sure to copy the spreadsheet and then edit that):
Thank you for your response.
I’m quite sure that the battery voltage is not running out, battery is charged full with 4,20V each cell. Btw, How does the current ramp effect to the Myxa? Am I right when set it to 70?
The state-of-charge of the battery is irrelevant. What matters is whether the total DC link voltage is sufficient for the motor to deliver the required torque to reach the speed where the thrust is sufficient. This can be checked as I described in the previous post. Alternatively, you could temporarily switch to a higher-voltage battery, like 7S or 8S, and see if the problem is gone.