Hello everyone! ![]()
We have finished tests with Myxas based on Cyphal and Telega v1 firmware and ready to show you our progress ![]()
Frame
The frame of the quadcopter is made of carbon fibre tubing and textolite. The v505 motors are attached to the tubes. The CUAV V5+ is used as an autopilot. The propellers are 16 inches long. 6S battery is installed as a power source. The whole appearance can be seen in the figure:

Myxas and Cyphal
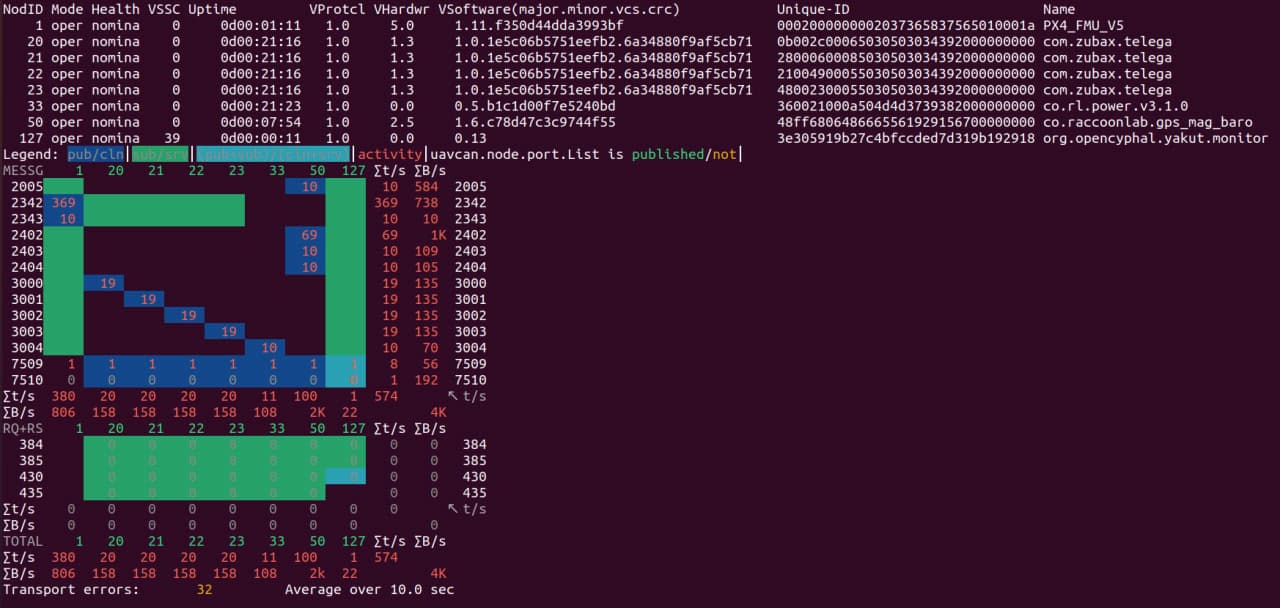
We installed Myxa on each motor and used Cyphal bus to communicate additional modules like RaccoonLab GNSSMAGBARO and Power Module. On the autopilot we installed the PX4 autopilot firmware branch with Cyphal. Yakut was used for configuration. In the figure below is y mon with all configured nodes:
Results
We did 25 flights in the first 2 weeks of October and we liked the results. Here is one of the flights for you to watch:
