Hello Pavel! As of now, I am not so much concerned about the jitter in RPM as we seem to have resolved this!
I did, however, want to ask you a question about how the ESCs are tracking commanded RPM from PX4. Earlier in this discussion you had mentioned:
The raw ratiometric setpoint is linearly interpolated between
m.min_eangvelandm.max_eangvel. See Telega v0 quick-start guide
I have attached two plots. Figure 1 uses the “RPM control mode” set on the ESC:
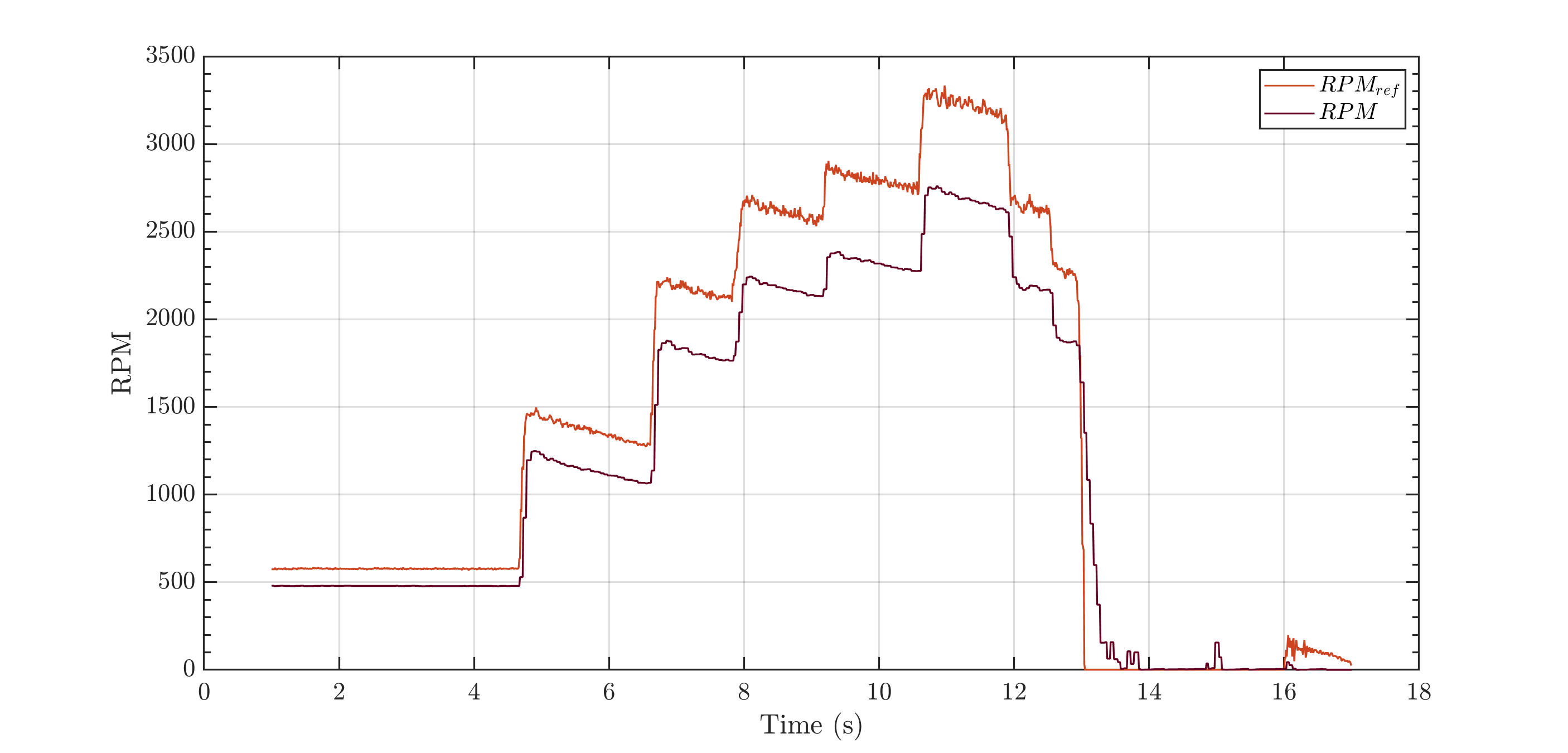
Figure 2 is our results using the “Voltage control mode”:
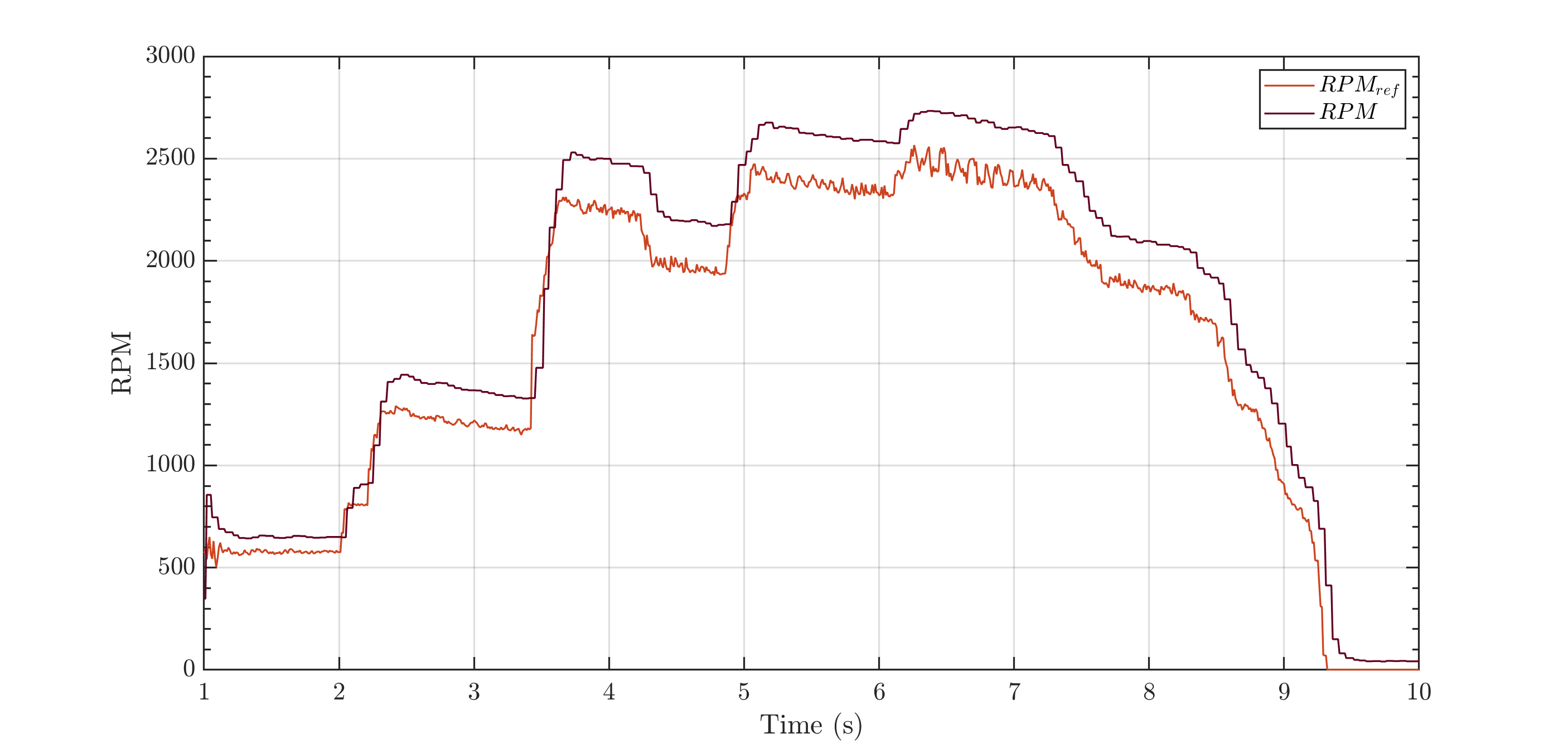
The orange line is the commanded RPM taken from PX4 taken in the actuator_outputs uORB topic. The dark maroon line is the actual RPM logged from the ESCs in the esc_status uORB topic. When commanding between 1 and 8191 in PX4, how do I know that RPM command from PX4 is being interpreted properly by the ESC? The commanded RPM from PX4 in Figure 1 is consistently ~+400 higher than the RPM that the ESC tracks.
In summary, should I expect the ESC to be tracking the commanded RPM value logged in the actuator_outputs topic or should I change how I am sending my commands through PX4?
Here are the two ulog files associated with the bench tests
Ulog file associated with Fig. 1:
log_61_2024-2-27-00-11-44.ulg (3.1 MB)
Ulog file associated with Fig. 2:
log_64_2024-2-27-00-24-08.ulg (1.9 MB)