I have the same question as you. Hopefully Pavel can expand the getting started guide section. Quick start guide for Myxa . Have you run your motors through the motor identification process in Kucher?
Kucher will figure out the best parameters for a motor using either Resistance, Inductance, Flux linkage. It then fills out a bunch of control parameters . In the run tab of Kucher, it then allows for several ways to control the motor (e.g Radiometric RPM) . For Radiometric control which is really you control radian’s per sec - I’d like to know how this maps to the RPM command.
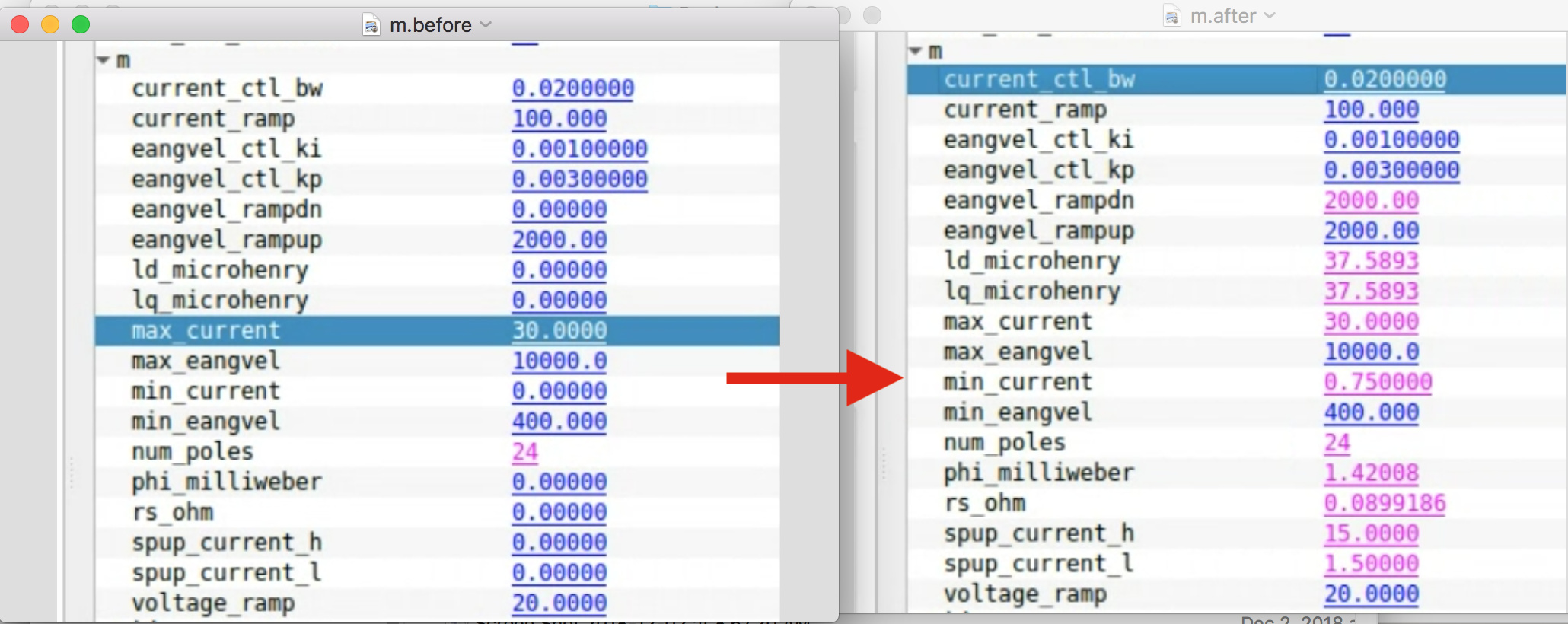
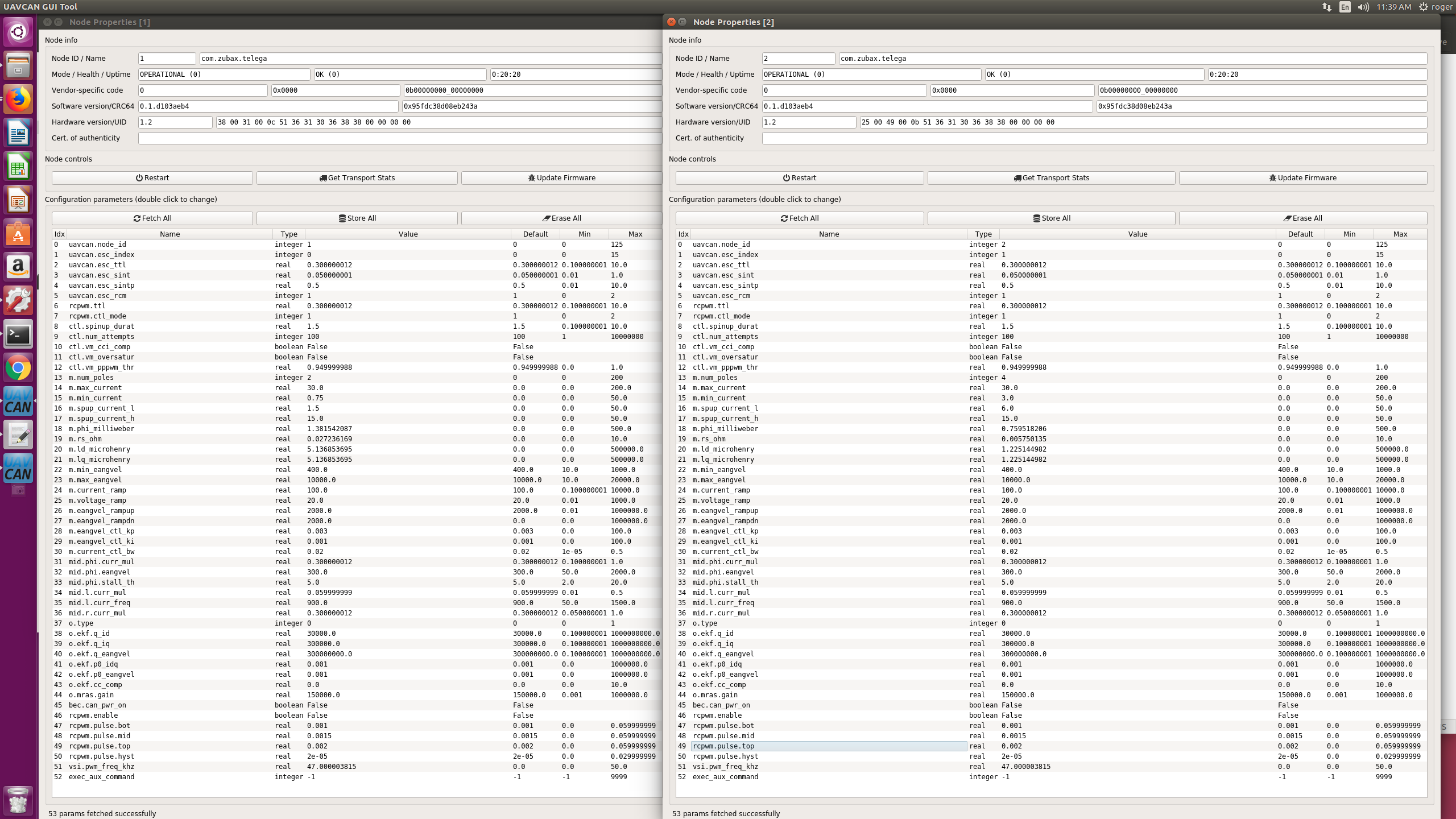
I am attempting to use the uavcan.equipment.esc.RPMCommand(rpm=[rpm_setpoint]) with sensible values as well, but I am not getting the desired effect I want, especially when “starting up from zero”. Sometimes The motor just stutters. I’d like to understand the parameters and increment value/frequency to pass to the RPMCommand . I’m hoping Pavel can point to which of the 53 parameters we should be considering for use with the RPM command . I have included a side by side comparison for 2 motors I ran through Kucker’s ID process (a 2 pole and a 4 pole). The choice of values as can be seen vary.