This document contains some considerations related to a demonstration drone with one of the Telega based motor controllers. Two controllers are reviewed below:
- Sadulli. Fits smaller drones with a payload capacity of 1-4 kg and flight time up to 1 hour
- OpenMyxa. Intended to be used in bigger drones with a payload capacity up to 15 kg and flight time about 30 minutes
Small drone considerations
There are two options of Sadulli drive:
Sadulli characteristics
| Parameter | Sadulli Grosso | Sadulli Piccino | Unit |
|---|---|---|---|
| Mass | 207 | 66 | g |
| Optimal thrust | 1500 | 1000 | gf |
| Max thrust | 3000 | 1800 | gf |
| Maximum continuous DC current(with 8S battery) | ~20 | ~10 | A |
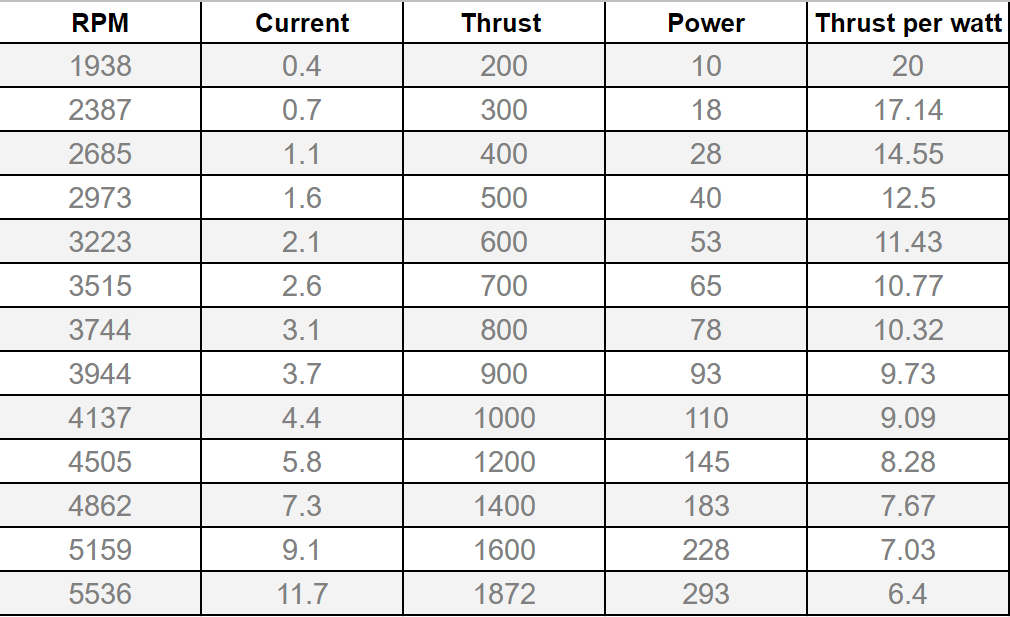
Sadulli Piccino thrust table
Let’s make some suggestions about Sadulli Piccino driven drone.
Sunnysky kindly provides the thrust table for V4006 motor with 15-inch propeller. Although this propeller slightly differs from one that is used in Sadulli Piccino, we will ignore this fact. We also have reason to believe that Sadulli can be more efficient than a Sunnysky controller. To maintain efficient flight the drive system should output no less than 10 grams of thrust per watt.
According to the table above this means that propeller should not be spun faster than 4000 RPM which conveniently can produce 1000 gf of thrust.
Sadulli Piccino itself with propeller weights ~150g(129g Sadulli + 21g propeller). Carbon fibre beam with 3d printed motor mount and motor wires adds 50 more grams. This leaves 800g/beam for the central plate + battery + payload.
- Quadcopter - 800 * 4 = 3.2 Kg
- Hexacopter - 800 * 6 = 4.8 Kg
Couple words about the battery. Each Sadulli consumes about 100w during an efficient flight(specific thrust > 10 gf/W). So at 8S (~30V) each Sadulli consumes 100/30 ~ 3.5 A(some margin added).
At maximum thrust power output is 3 times higher, so each motor will consume about 10 A In the case of a quadcopter, the battery should be capable of delivering up to 40A and 60A for hexacopter. There are two approaches to battery problem:
- Creating a battery best suited for the application from single cells
- Searching for a COTS battery
Battery capacity depends on the desired flight time. Let’s say we want 1 hour (this also eases the calculations). Each Sadulli motor consumes about 100W of power during an efficient flight. This gives the necessary energy of
- 100 * 4 = 400Wh for quadcopter
- 100 * 6 = 600Wh for hexacopter
At this stage it is possible to form the requirements for the battery for quadcopter:
- Number of cells - 8 (nominal voltage 30V)
- Discharge current - 35-40A
- Energy 400 Wh
- Mass < 2Kg
Possible Candidate: MaxAmps 8S 16Ah 2.7kg $700
Requirements for the battery for hexacopter:
- Number of cells - 8 (nominal voltage 30V)
- Discharge current - 50-60A
- Energy 600 Wh
- Mass < 3Kg
Possible Candidate: MaxAmps 8S 22Ah 3.4kg $900
In case battery construction approach is selected:
One of the best cells for medium power battery construction at the day is LG INR18650-HG2.
- Battery Capacity (Mfg Nominal): 3000 mAh
- Battery Chemistry: Li-Ion
- Battery function: Rechargeable
- Battery Form Factor: 18650
- Battery Rated Voltage: 3.6 V
- Max current output - 20A
- Mass 45g
UAVCAN BMS are available or soon to be available from ARK Electronics, NXP, CUAV, and possibly others. Some relevant resources are linked below:
We will not be engaging in the design of a custom BMS.
Quadcopter
In order to meet the requirements (almost) 8S4P battery is needed, giving total 8*4 = 32 cells. This will be a battery with ~1.5Kg mass and ~350Wh energy capacity which is close enough to the desired specs.
Hexacopter
In order to meet the requirements(almost) 8S6P battery is needed, giving total 8*4 = 48 cells. This will be a battery with weight ~2.2Kg and capacity ~540Wh which is close enough to the desired specs.
With COTS batteries the results tend to be similar or worse.
Of course, this is not the complete drone. But it seems to be possible to design a drone with a one hour flight time based on Sadulli integrated drive. And it will have following thrust margin
- Quadcopter: 3.2 - 1.5 = 1.7Kg for construction elements, on-board electronics and payload.
- Hexacopter: 4.8 - 2.2 = 2.6Kg for construction elements, on-board electronics and payload.
The statements above are correct in case of efficient flight mode when hovering in place with no wind, the rotors are equally loaded, and normal atmospheric pressure. Real-life conditions are hard to predict.
From my experience, electronics and all the necessary construction elements for a drone should weigh less than 400g, which still leaves a wide range of payloads that will fit this project. For example, the body of Sony A7R(camera that is typically used in plane surveying) mass is 465g and average lens mass is ~0.5Kg, so in case some lightweight gimbal can be found this should work even with a quadcopter (still flying in efficient mode)
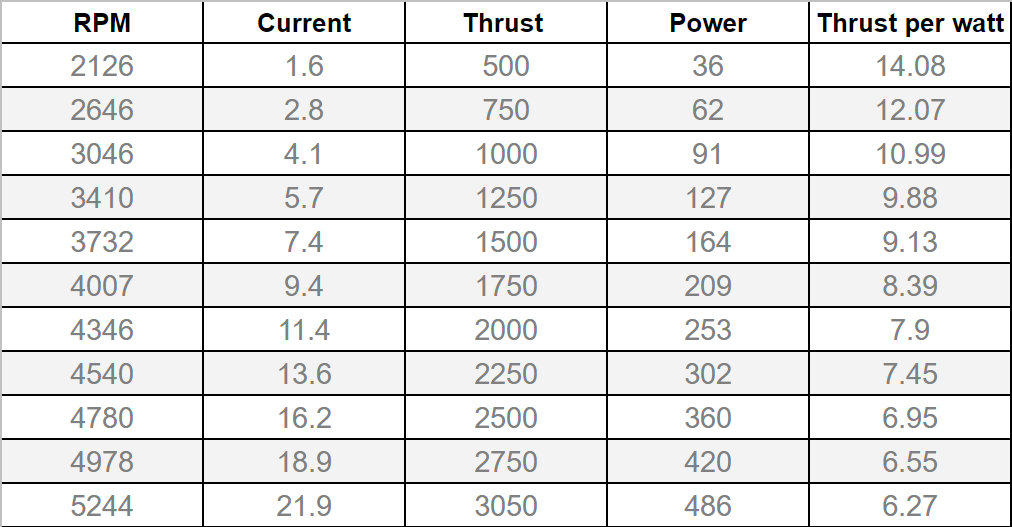
Sadulli Grosso thrust table
Sadulli Grosso propeller weight is 41g
Same considerations as above are applicable to Sadulli Grosso
Sadulli Grosso and propeller weight ~ 204 (Sadulli) + 41 (propeller) = 245g
Sadulli Grosso max efficient thrust - 1500g
Sadulli Grosso power consumption in efficient mode ~ up to 150W
This gives 1500 - 245 ~ 1250 g of pure thrust per motor in efficient mode (which is about x1.5 times more than Sadulli Piccino).
So, in theory, Sadulli Piccino hexacopter should have very similar characteristics to Sadulli Grosso quadcopter. Sadulli Grosso hexacopter should have about 1.5 times more payload mass which is around 4Kg. All stated above supposes that the aircraft is always in highly-efficient flight. So there is a good margin in thrust.
Sadulli Grosso powered aircraft may lift up to 8-10 kg of payload if efficiency and high endurance is not the purpose. Just as a reference, this bathroom sink mass is around 7 kg. Propeller efficiency with such a payload will decrease around 35% so it should be possible to hover with something like that for 60 min * (1 - 0.35) ~ 40 minutes.
COG estimations
Sadulli Piccino quadcopter
| Name | Price | Qty | Total |
|---|---|---|---|
| Sadulli Piccino | €136 | 4 | €544 |
| Miscellaneous electronics | €1000 | 1 | €1000 |
| Battery | €750 | 1 | €750 |
| Frame | €400 | 1 | €400 |
| Battery charger | €300 | 1 | €300 |
| Tools, 3d printed plastic parts and other miscellaneous parts | €200 | 1 | €200 |
| RC transmitter and other electronics for tests and debug | €1000 | 1 | €1000 |
| Total | €4194 |
Smallest possible option. Estimated flight time with 1 kg payload - 1 hour.
Sadulli Grosso hexacopter
| Name | Price | Qty | Total |
|---|---|---|---|
| Sadulli Grosso | €157 | 6 | €942 |
| Miscellaneous electronics | €1000 | 1 | €1000 |
| Battery | €1000 | 1 | €1000 |
| Frame | €400 | 1 | €400 |
| Battery charger | €300 | 1 | €300 |
| Tools, 3d printed plastic parts and other miscellaneous parts | €200 | 1 | €200 |
| RC transmitter and other electronics for tests and debug | €1000 | 1 | €1000 |
| Total | €4842 |
Medium powered option. Estimated flight time with 4 kg payload - 1 hour.
Big drone considerations
There is also an opportunity to build a bigger drone for much heavier payload. Although it is not absolutely clear what type of payload may need such a thrust margin (it should be made up).
Bigger drones need bigger propellers. These bigger propellers need bigger motors that can spin them. Bigger motors need a controller for higher power levels. Luckily Zubax has one suitable controller.
OpenMyxa
- Continuous power output up to 1800 W
- Supply voltage - 8-55V (4-12S LiPo battery)
This narrows the field of possible motor/propeller combinations that may be used. In the case of two blade propellers (which are the most efficient ones after single-blade propellers) its diameter should be around 30 inch.
EOLO CN28*9.5 looks reasonable.
Brief specs:
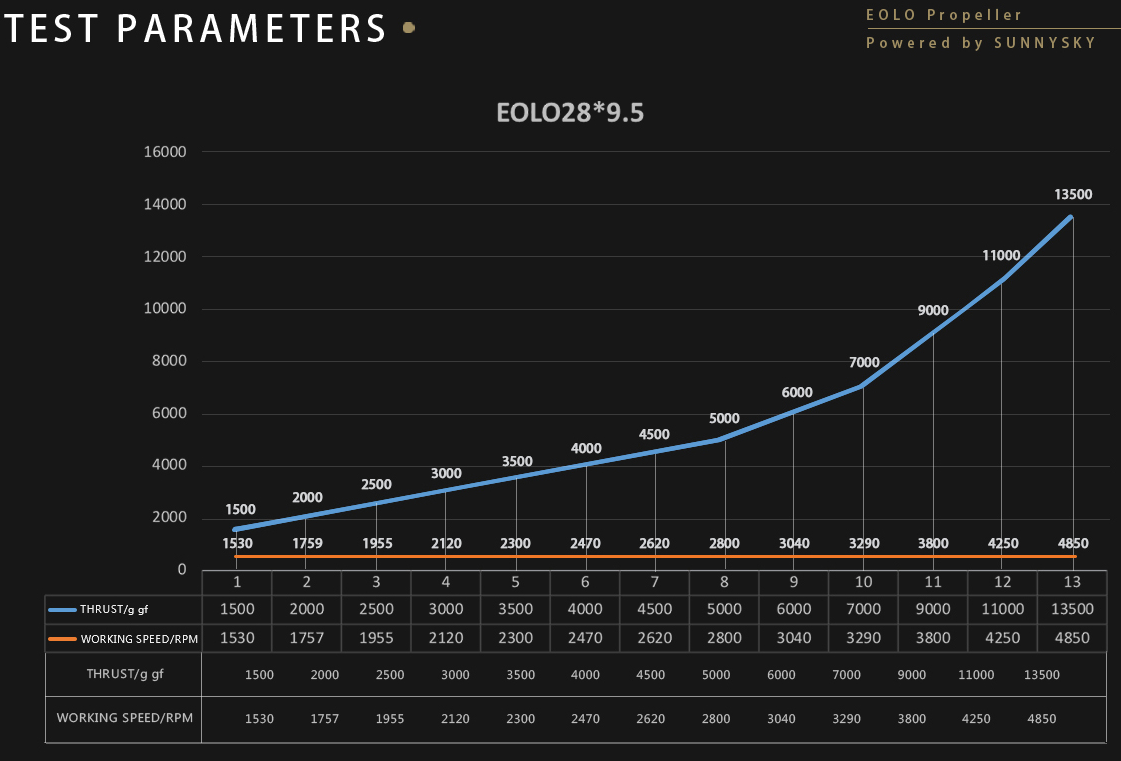
- Weight - 132 g
- MAX RPM - 4850
- Folding design
- Price $32 @ 1 pc.
For spinning a propeller of this size a reasonable big motor is needed. Sunnysky manufactures several motors that can fit:
| Motor | X8016S | V8117 | M8 pro V2 |
|---|---|---|---|
| Mass (g) | 560 | N.A. | 247 |
| Max Power (W) | 3025 | N.A. | 1100 |
| Price ($) | 163 | 193 | 179 |
X8016S and M8 pro V2 both seem reasonable, but the most comprehensive data is available for X8016S so let’s stick with it just yet
Although data provided is relevant for 30 inch propeller difference with 28 inch shouldn’t be huge and all the trends will be the same.
To achieve efficient flight with this motor and propeller RPM should be kept under 3000 which gives thrust of about 5 kg with power consumption of about 500 W. This still leaves the possibility to double the thrust which may be needed for maneuvering or during ascending but the craft will fly in less efficient mode. In the case of a hexacopter it may be possible to achieve a total thrust of about 30 kgf in efficient flight mode. As a rule of thumb, payload may take up to half of that number leaving 15 kg for the drone itself
Battery should be able to provide such current, which means in case of 12S battery it should be able to provide 1000/(12*3.7) ~ 22.5A peak with an average of ~12A per motor.
Needed battery capacity is determined by the desired flight time, flight mode and drone mass. Of course, all these variables can’t be predicted in this document, but for rough estimation, let’s assume drone mass is 30kg, it flies in efficient mode only (specific thrust 10g/w or better) and desired flight time is 30 min. This yields the required battery energy of
30 000 / 10 * 0.5 = 1500 Wh
To determine the last limitation on battery construction some basic mass calculations are needed.
- Total thrust margin - 15Kg
- Motor (M8 pro V2) + propeller mass - 330 + 132 = 462 g. Some nuts and bolts will definitely be needed, so this number can be rounded to 0.5 kg
- As the proposed drone configuration is hexacopter all the motors and propellers mass is 0.5 * 6 = 3 kg
This leaves 15 - 3 = 12 kg for the frame, electronics, wires and battery.
The heaviest electronic part is OpenMyxa with its mass of about 100 g and as 6 of them are needed they will take 600g. There are probably no more electronic components of considerable mass, so 400g margin for all the rest seems reasonable.
So, the battery and frame mass combined should not exceed 11Kg. As the frame mass heavily depends on the construction, materials applied and additional features (like landing gear) it is hard to predict. As a rough estimation the frame mass may be somewhere around 5-6 Kg.
Battery requirements are:
- Voltage 12S
- Max continuous current - 22.5 * 6 = 135A
- Energy capacity1500 Wh
- Mass < 5 kg
At first glance, these requirements seem to be unrealizable. But this is only because they are. Still, some solution should be found and it should be as close to the requirements as possible.
In the image below some readily available battery assemblies may be observed.
It is obvious they don’t match the requirements a lot. Because of this and also because it may ease the frame construction a creation of a custom battery should be considered. And as with smaller drones, the most versatile building block for such a battery is 18650 cells. For example,
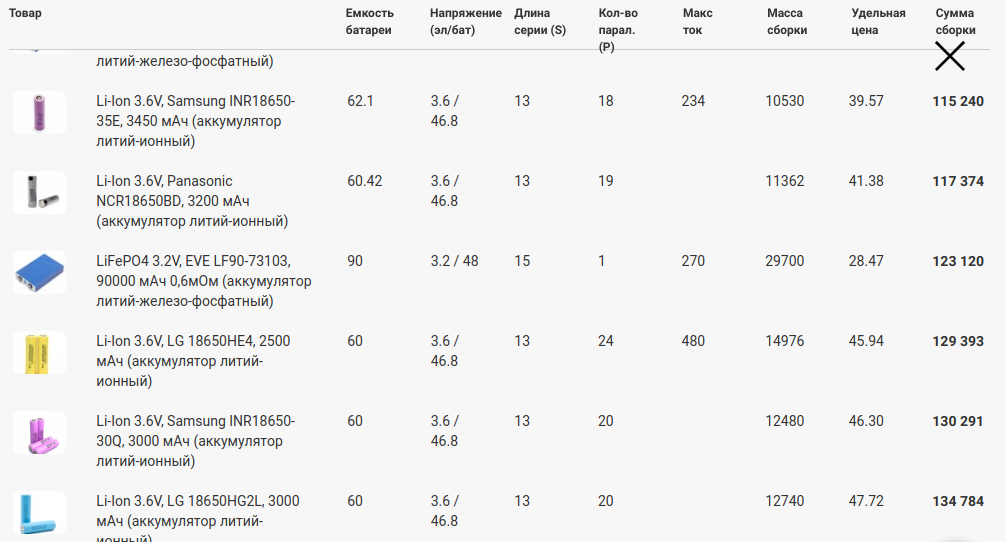
the aforementioned LG INR18650-HG2 or Samsung INR18650-30Q.
12S12P battery configuration that uses cells above should provide ~1500 Wh of power and be able to withstand 180-220A current consumption.
The only obvious downside of such a battery is its mass and size. Its mass cannot be less than 7 kg. Also its size will be so big that it definitely should also be used as a frame part.
COG for such a battery is around 1000 EUR (~600 for the cells).
Considering the usage of ready available hobby-grade LiPo battery packs (which is common in the industry), it should be mentioned that they are typically heavier. For example, Turnigy High Capacity 14000mAh 6S (https://hobbyking.com/en_us/turnigy-high-capacity-14000mah-6s-12c-multi-rotor-lipo-pack-w-xt90.html).
This battery contains roughly 310Wh of energy. 2 of them are needed to make a 12S battery. So in order to create at least half-decent battery 4 such packs are needed. Mass of 1 pack is 2280g, which means the battery of insufficient (1240Wh vs needed 1500Wh) capacity will have mass over 9 kg.
One more approach may be considered: constructing the battery out of rectangular LiPo cells. According to https://lpbattery.ru/ there exist 11122215-30000 type of cell which is a single LiPo cell with 30Ah capacity and rated for up to 5C (150A) discharge current. Its mass is only 540g. This enables to construct a battery comparable to 18650-cell battery.
COG estimation for OpenMyxa powered hexacopter
| Name | Price | Qty | Total |
|---|---|---|---|
| X8016S motor | $163 | 6 | $978 |
| EOLO CN28*9.5 propeller | $32 | 6 | $192 |
| OpenMyxa motor controller | €220 | 6 | €1320 |
| Miscellaneous electronics | €1000 | 1 | €1000 |
| Battery | €1000 | 1 | €1000 |
| Frame | €1000 | 1 | €1000 |
| Battery charger | €400 | 1 | €400 |
| Tools, 3d printed plastic parts, fasteners and other misc parts | €250 | 1 | €250 |
| RC transmitter and other electronics for tests and debug | €200 | 1 | €200 |
| Spare parts | €300 | 1 | €300 |
| Total | €6640 |
Estimated flight time with 15kg payload - 30 min.
Conclusion
Zubax robotics off the shelf hardware enables the construction of very different UAVs with considerably different payload mass. Although power level may vary a lot, costs for one-off prototype are similar. Thus the most value represents the biggest UAV with maximum payload. This is hexacopter based on OpenMyxa.
Construction thoughts
Drone mechanical arrangement
Although there are plenty of possible drone frame arrangements, one should be considered for this project - the H-drone.

A good reference for such a frame can be found here https://pinshape.com/items/31107-3d-printed-quadcopter-h-frame
The main advantages of this arrangement are
- Mechanical simplicity
- High rigidity
- The ease of extensibility
- Low price and the lack of complex custom manufactured parts.
- Is applicable for quadcopters and hexacopters
Drone logical organisation
Typical drone logical organisation scheme can be found in the diagram below
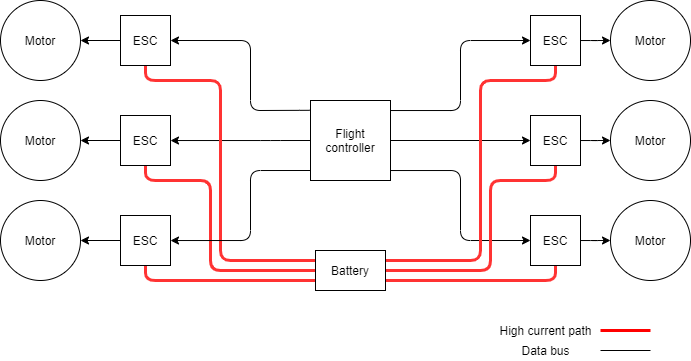
The flight controller commands ESC using some kind of PPM protocol over a dedicated data line for each ESC. All the ESCs are powered from one battery, that is located somewhere in the center of the drone. All this requires lots of wiring and what is worse - high power wiring.
A novel approach of constructing isolated thrust modules should be considered. These thrust modules should include the motor, the ESC and the battery in one package. The amount of external connections should be kept as low as possible. Something similar may be found at Tundra-M. PBF 3D printed fully-modular, flight-ready drone.
It is very likely such a thruster should be made in the form of a beam of multirotor, so there is enough space for everything. In the case of the OpenMyxa hexacopter described above, such a thruster should carry a 12S2P battery, which means a total of 24 18650 cells. Drone logical arrangement then transforms.
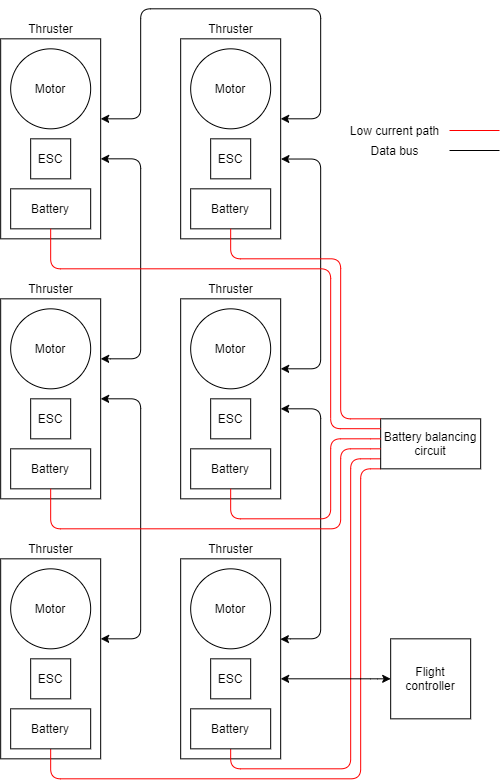
The key advantage of such an approach is that the power source and power consumer are physically located in one compact module thus eliminating the need in long high power wires(that are usually relatively heavy). Also, advanced data bus allows for better telemetry collection and makes Flight controller independent of particular propulsion system implementation as all the data is available on the bus in form of standardized messages and there is no need to support dedicated means of health and status monitoring for each ESC. It may be beneficial from a mechanical design point of view too as in this case the battery mass isn’t located in one place. Instead it is spread all over the aircraft reducing the load on the beam to the central plate joint (which is one of potential points of mechanical failure).
Ideally, such thrusters should have some kind of quick connection system so that it will be possible to construct any aircraft needed (with 3,4, 6 or 8 thrusters) in case the central plate allows for that. Though this is dependent on the mechanical design and is out of the scope of this document. As these thrusters are to be developed it would be reasonable to form some requirements for them
Each thruster should
- Contain motor
- Contain motor controller
- Contain battery of reasonable capacity and voltage
- Communicate with outer world via 2 UAVCAN interfaces
- Use dedicated balancing/recharging power supply connector
All other thruster properties are to be defined during further development.
On-board electronics
Except for propulsion system each UAV has some on-board electronics. Only UAVCAN-enabled devices should be chosen (if possible). Please refer to the table below for possible candidates.
| Flight controller | GNSS | BMS |
|---|---|---|
| Holybro Durandal | Zubax GNSS2 | UAVCAN BMS from NXP/ARK/CUAV |
Important notice
As the proposed project is all about aerial UAV development, it should be noted that such mechanisms are prone to catastrophic disintegration as a consequence of even minor malfunctions and/or design flaws. This gets worse if the development team isn’t experienced in the field (which is probably the case with student teams). The final project budget for parts and tools should be arranged making allowance for these issues.