I’m not too sure I understand what you mean. A quick Google search for the Telega v1 docs yields: Status indication LED - Telega v1.0 Reference Manual. Here is the LED codes and what they mean. I think I misunderstand your description of the LED colours.
good day, it blinks with a combination that is not in the documentation - namely red-green, in the documentation there is only red-yellow blinking. Could you describe in more detail how you flashed via ST-link. Thank you


I’m afraid this is a question best answered by a certain, @pavel-kirienko.
The LED is not meant to the the ultimate way to diagnose the state of the device; it is mostly just a hint. That said, I think you might be actually seeing red and yellow rather than red and green. To see what’s up, you need to connect to the device via CAN and:
-
Subscribe to the heartbeat topic and check the values of the fields
healthandvendor_specific_status_code. The interpretation is documented at Cyphal interface - Telega v1.0 Reference Manual -
Read register
sys.status. See Architecture - Telega v1.0 Reference Manual
If you need help setting up the Yakut CLI tool, check this tutorial: Yakut CLI tool - Telega v1.0 Reference Manual
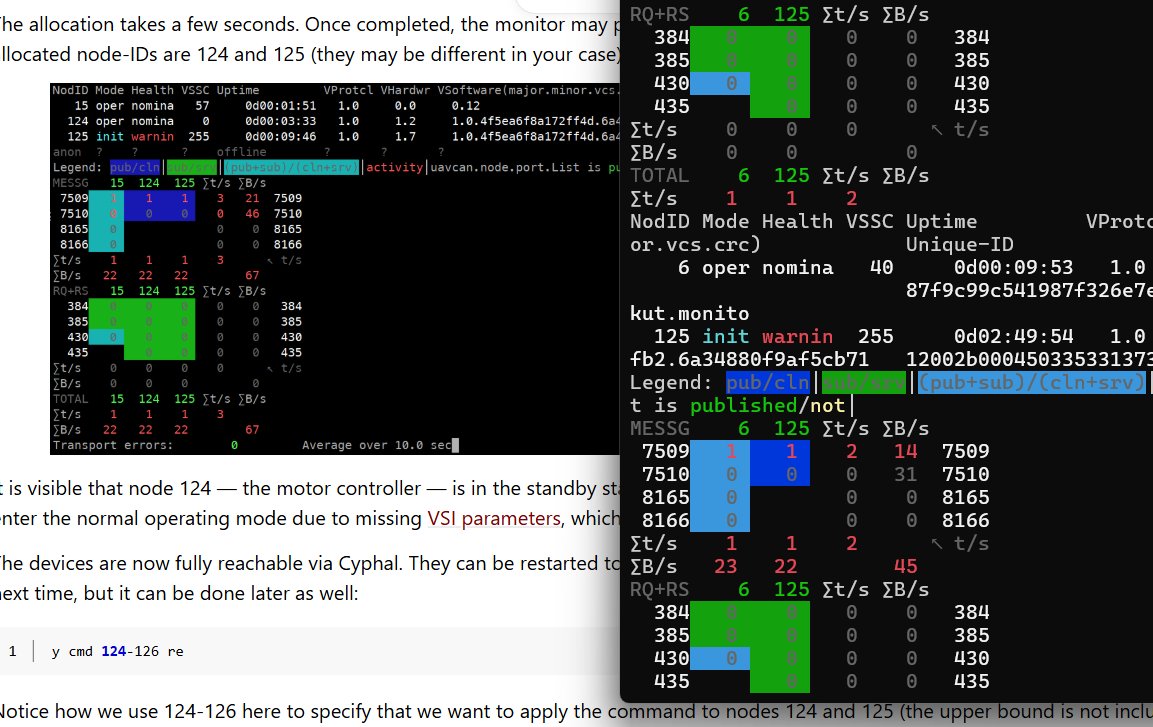
Good afternoon, please tell me, apparently, node 124 is not detected - the engine controller, what could it be? and another question, if I have saved the parameter sheet from TELEGA v0.5, and I updated to V1.0, will I be able to use these parameters as a configuration file for uploading parameters?
How many nodes do you have connected to the network? Do I understand correctly that you have two motor controllers, one of them having the node-ID of 125 (as evidenced by the screenshot) and the other one 124? Have you configured the other one yourself? If yes, how?
Node 125 says that it is missing the configuration parameters and cannot initialize. The uninitialized state is documented here: Architecture - Telega v1.0 Reference Manual. To fix the problem, you need to provide the missing parameters as described in the reference manual, VSI chapter. As an example, here are the parameters for Komar (taken from the Komar docs):
vsi.bridge_resistance: [0.002, 0.003, 0.002, 0.003, 0.002, 0.002]
vsi.phase_current_gain: [100, 100, 25, 25]
vsi.phase_current_stderr: [0.3, 0.3, 0.2, 0.2]
vsi.thermistor_v2k: [223.15, 100.0, 0.0]
if I have saved the parameter sheet from TELEGA v0.5, and I updated to V1.0, will I be able to use these parameters as a configuration file for uploading parameters?
No. You need to start the configuration process from scratch, following the tutorial.
Thank you, if we send you our device number, can you give us some recommendations on how to set it up based on this information, since you did the previous setup? Perhaps you will have some kind of “recommended configuration” for our assembly.
Okay. It shouldn’t be difficult to set it up, but if you prefer, you can send the info to me via pavel.kirienko@zubax.com.