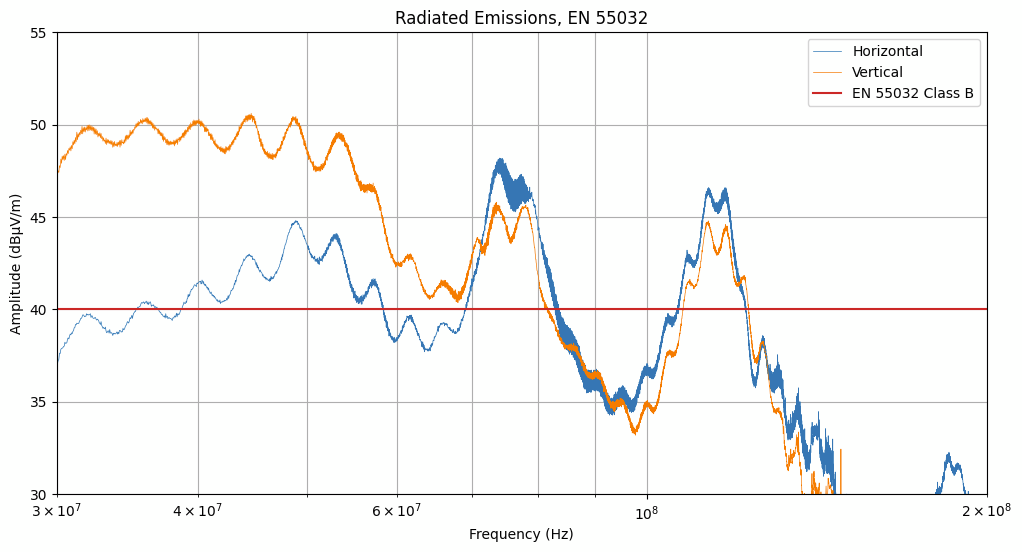
During EMC pre-compliance testing, we have measured the emissions below. As can be clearly seen, the limits defined by EN 55032 Class B are exceeded in the 30…150 MHz band.
We tested conformance per EN 55014 Class A (non-residential environments) but not EN 55032 Class B (residential environments). I think it might be slightly unusual that you require compliance with the stricter standard, although I am obviously not familiar with the nuance of your application.
You could try either or all:
Increase vsi.pwm_freq_mul_log2 from the default value of 1 up to 2. Do not increase further. Ensure the resulting reduction in the voltage utilization factor is acceptable – the drive may not be able to reach the maximum speed at lower DC link voltages.
Consider adding an LC filter as mentioned here: Lower Myxa PWM frequency - #11 by pavel-kirienko. The inductors are connected in series with the motor phases and the capacitors are connected in a star topology with the floating central node on the motor side of the inductors. Ensure that the gain/attenuation of the filter does not exceed 2 dB below 100 kHz, otherwise the filter may interfere with motor state estimation. It is best to move the cutoff frequency toward the higher frequencies as much as you can. Perhaps you could start with 50 nH + 1 uF; watch out for the parasitic resistance of the inductor.